・上一文章:大众速腾轿车无灯光冷监控报警
・下一文章:奥迪A8组合仪表上前照灯水平调节警告灯点亮
转弯照明灯功能需要参考转向角和车速等参数。为启用转弯照明灯,必须事先通过行车灯自动控制装置接通近光灯。只有满足表4所示的这些条件时才能启用转弯照明灯。
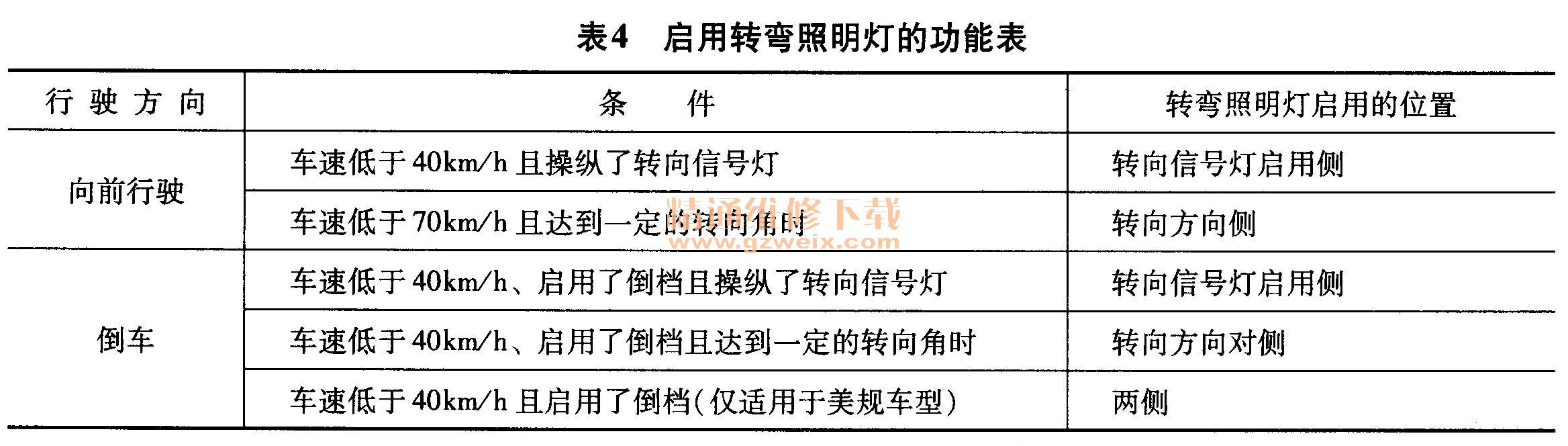
如果因故障等原因有一个信号失灵,则不再接通转弯照明灯。转弯照明灯带有过热保护功能,使用时间过长时可能会短时停用转弯照明灯。在转弯半径小于100m的急弯中行驶时,在车速不超过70km/h的情况下也可以启用转弯照明灯作为辅助照明。在蜿蜒曲折的道路上行驶时可以明显感觉到其照明效果。转向盘转到某一角度时即可启用该功能。
车速低于40km/h时可以通过接通转向信号灯或转向盘转动角度启用转弯照明灯。
启用转弯照明灯需要输入的参数如下:通过行车灯自动控制装置接通行车灯、转向角、车速、车灯开关位于行车灯自动控制位置。
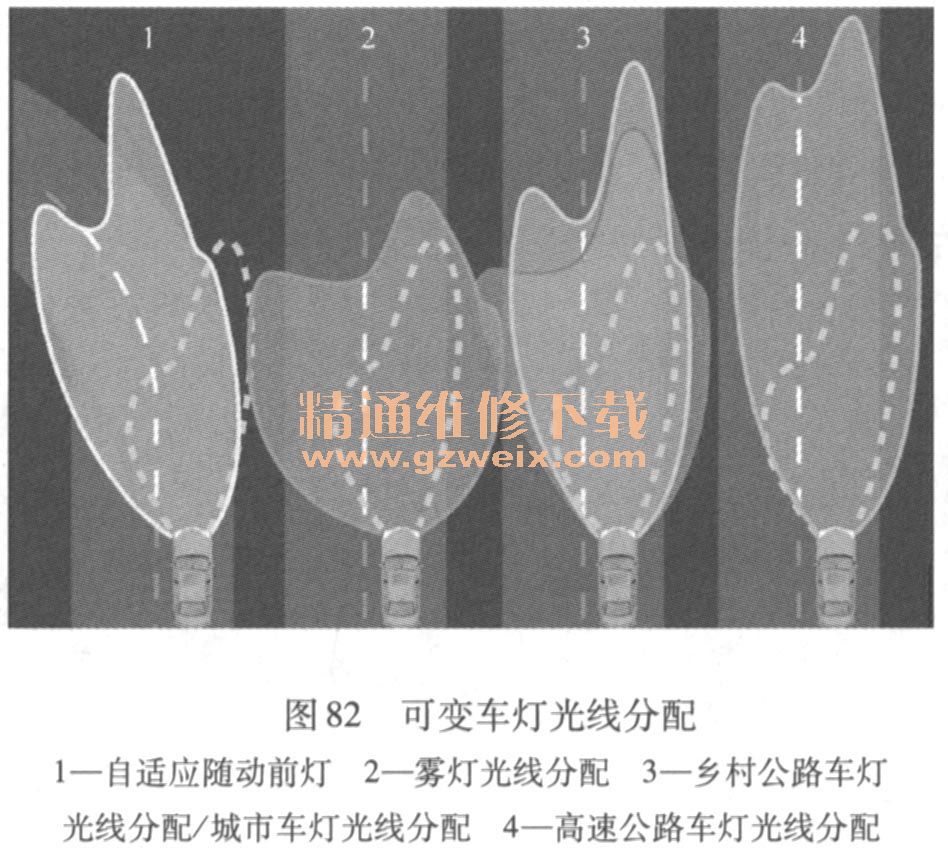
3)可变车灯光线分配。可变车灯光线分配功能全部集成在脚部空间模块内。脚部空间模块需要不同的输入信号。部分输入信号如下:通过行车灯自动控制装置接通行车灯(晴雨/光照/水雾传感器);车速(集成式底盘管理系统,通过FlexRay提供);行车灯接通(转向信号灯和远光灯开关,通过FlexRay提供,冗余信号);前雾灯接通(前雾灯开关,通过LIN总线提供);转向角(转向柱开关中心,通过FlexRay提供)。
脚部空间模块控制和监控这项功能,出现功能故障时脚部空间模块将前灯设置为乡村公路车灯光线分配模式。从总线端15接通开始就可以通过行车灯自动控制装置接通车灯,接通时首先进行前灯的参考运行。
如图82所示为各种情况下的可变车灯光线分配,虚线图形部分为传统的直线行驶时车灯光线的分配。原则上车速低于40km/h时启用城市车灯光线分配,车速超过45 km/h时启用乡村公路车灯光线分配,车速110km/h以上时启用高速公路车灯光线分配。各车灯光线分配之间不是以阶跃方式,而是以连续平缓的形式过渡到所设置的车灯光线分配模式。
①远光灯瞬时接通功能。从总线端15接通开始,可以在任何车灯光线分配模式下通过转向信号灯和远光灯开关操纵远光灯。脚部空间模块通过LIN总线接收有关接通远光灯的请求。某一车灯光线分配功能处于启用状态时(乡村公路车灯光线分配除外),前灯直指行驶方向且设置为乡村公路车灯光线分配模式。如果车辆目前正在转弯行驶,则会考虑自适应随动前灯的摆动角度。只要远光灯处于接通状态,就会抑制城市、雾灯和高速公路车灯光线分配。关闭远光灯后脚部空间模块会使车灯光线分配保持原状,直至接收到其他启用参数或关闭了车灯。
远光灯瞬时接通功能在任何车灯光线分配状态下都可以运行。启用远光灯瞬时接通功能时(即短时操纵远光灯),当前启用的车灯光线分配保持不变。
②城市车灯光线分配。城市车灯光线分配启用时,左侧车道边缘处的照射区域比以前大。为确保车道照射效果较好,脚部空间模块降低左侧前灯的照明距离并使其光束略微向左偏转。从得到“发动机运行”信号起即可启用城市车灯光线分配功能,发动机控制单元负责提供该信号。脚部空间模块通过K-CAN2接收“发动机运行”信号。如果车辆加速到车速超过45 km/h,脚部空间模块就会将车道照明从城市车灯光线分配切换为乡村公路车灯光线分配。如果车速降低到40km/h以下,则脚部空间模块会将车道照明切换回城市车灯光线分配。脚部空间模块通过FlexRay→中央网关模块→K-CAN2得到车速信号和“发动机运行”信号。
城市车灯光线分配的启用条件:
a.通过行车灯自动控制装置接通行车灯。
b.发动机运行。
c.车速低于40km/h。
脚部空间模块需要“发动机运行”信号来执行城市车灯光线分配功能。因此维修时应将车灯开关置于位置“2”,以便调节前灯。
启用城市车灯光线分配的同时也接通转弯照明灯,其启用条件见表4-4。
③乡村公路车灯光线分配。乡村公路车灯光线分配相当于以前用于近光灯的车灯光线分配。从总线端15接通开始即可执行此车灯功能。乡村公路车灯光线分配是基本车灯光线分配,在整个车灯光线分配系统出现故障等情况下采用基本车灯光线分配。
其输入参数如下:
a.通过行车灯自动控制装置接通行车灯。
b.车速超过40km/h。
c.车灯开关位于位置“2”和位置“A"。
启用乡村公路车灯光线分配的同时也接通转弯照明灯,其启用条件见表4-4。
④雾灯光线分配。雾灯光线分配随接通前雾灯而自动启用。在城市车灯光线分配和乡村公路车灯光线分配模式下可启用雾灯光线分配功能。如果雾灯光线分配启用时接通远光灯,就会将前灯设置为乡村公路车灯光线分配模式。高速公路车灯光线分配功能启用时就会取消雾灯光线分配,前雾灯本身仍保持接通状态。如果车速降低到80km/h以下,则重新启用雾灯光线分配。
其输入参数如下:
a.通过行车灯自动控制装置接通行车灯。
b.前雾灯接通。
c.远光灯接通。
d.高速公路车灯光线分配功能启用。
⑤高速公路车灯光线分配。如果车速为110km/h以上的时间超过30s或车速超过140km/h,脚部空间模块就会将前灯设置为高速公路车灯光线分配模式。如果车速降低到110km/以下,则会降低前灯。降低前灯(降低照明距离)以110km/h-*100km/h-+90km/h-+80km/方式分步进行。车速低于80km/h起会将高速公路车灯光线重新设置为乡村公路车灯光线配。
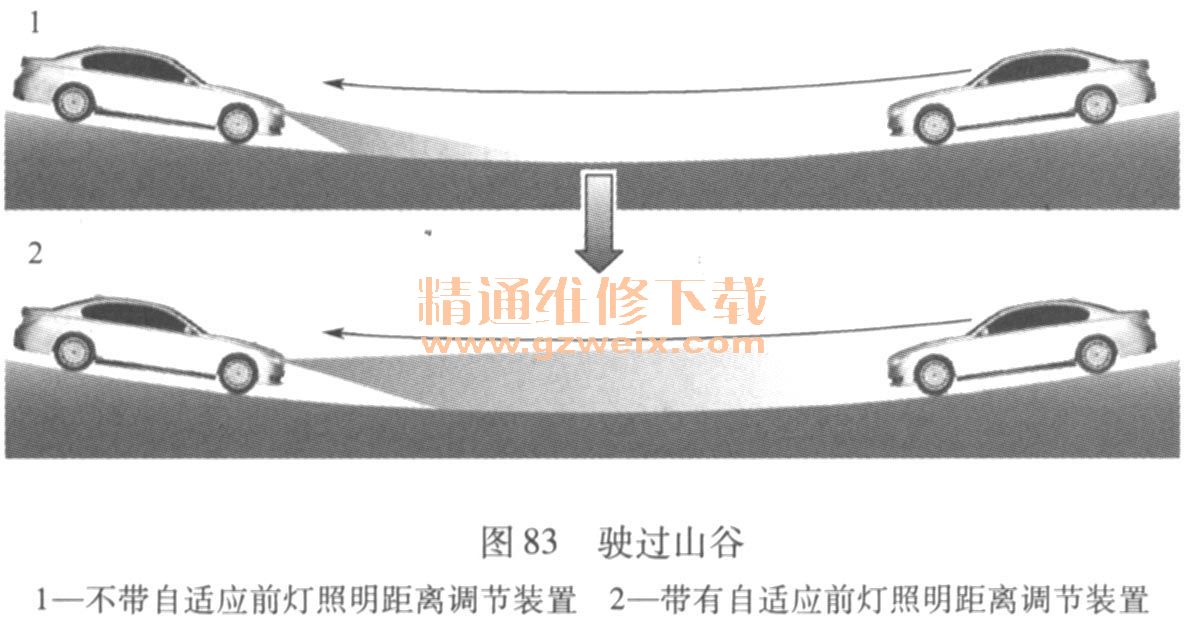
4)自适应前灯照明距离调节装置。自适应前灯照明距离调节装置是一项有助于安全驾驶的好措施。自适应前灯照明距离调节装置用于车辆通过山谷和山顶。
如图83所示,车辆通过山谷时前灯升起,前灯略微向上移动。在不造成对面来车驾驶人眩目的情况下,行驶区域内的视野更远,因此与传统的前灯系统相比,可以提前看到路面上的障碍物,从而可以提前对障碍物作出反应并在必要时避让绕行。
如图84所示,车辆通过山顶时略微降低前灯照射高度,从而相对于标准前灯而言降低对面来车的眩目感。箭头线相当于对面来车的驾驶人视线,驾驶人视线表示驶过山谷或山顶时驾驶人视线的位置。
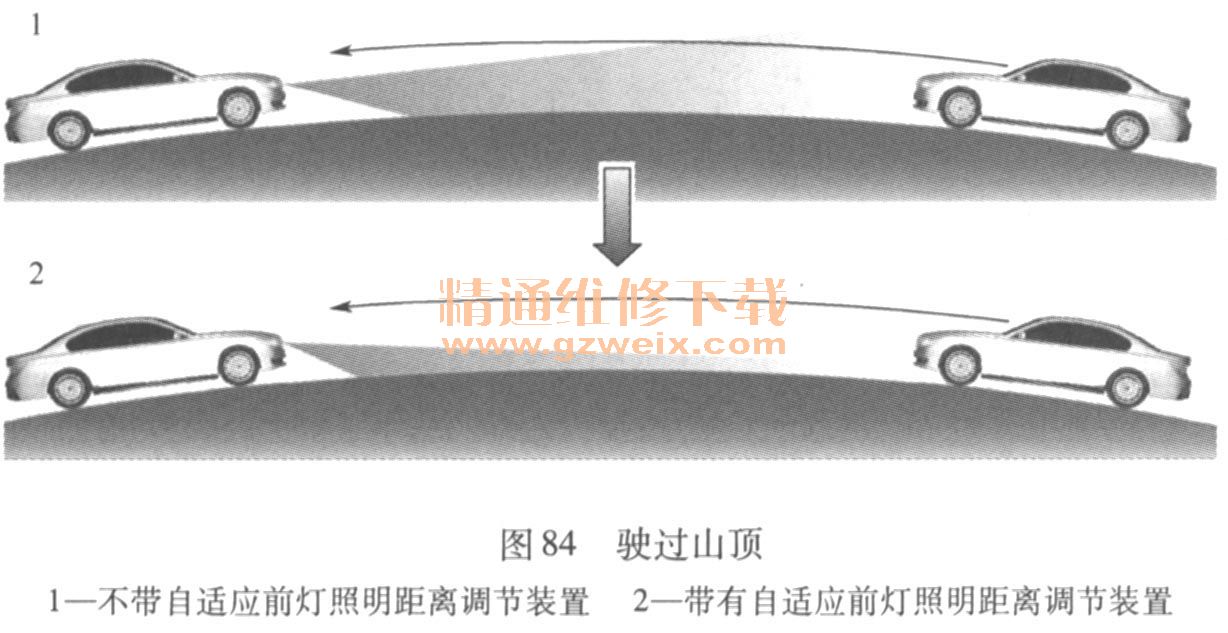
自适应前灯照明距离调节装置可以看成是旋转了90°的自适应随动前灯。
如图85所示为道路交通术语中所指的山顶和山谷。

如图86所示,车辆驶过山顶时系统需要山顶坡度角数据,否则无法识别出山顶。因此在山顶起点区域内以略微延迟的方式降低车灯。接近山顶终点时系统识别出坡度角逐渐向负值方向变化,此时为驶过山顶已降低了前灯。如果前灯保持在这个位置,就会造成在山顶终点处车灯照射到地面上。为防止出现这种情况,到达山顶终点前脚部空间模块使前灯返回到标准照明距离。山谷起点与山谷终点的识别方式与山顶识别类似。

如图87所示为自适应前灯照明距离调节
装置的系统概览。
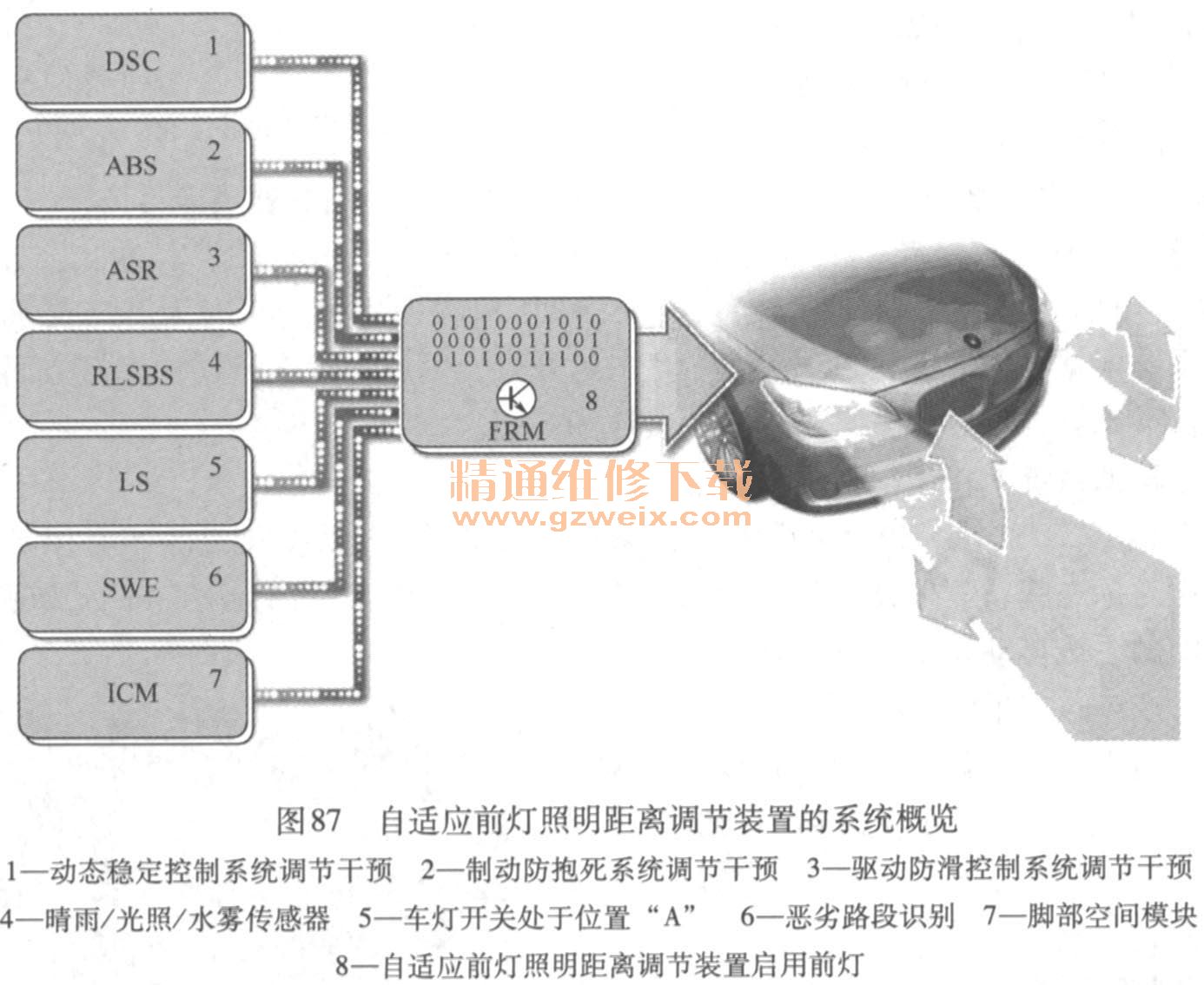
只有车灯开关处于位置“A”且通过晴雨/光照/水雾传感器接通了行车灯时,才能启用自适应前灯照明距离调节装置。系统主要根据两个信号的计算结果升起或降低车灯光线分配,即车速信号和车辆纵向加速度信号。根据这些信号可以计算出相对于地平面的坡度。脚部空间模块通过K-CAN2持续读取这些信号并据此计算出用于自适应前灯照明距离调节装置的实时数值。这些数值等于实时计算出的坡度角,如图88所示,坡度角可能是正值、负值或零。脚部空间模块根据各坡度角度之间的差值计算出是否需要调节前灯。
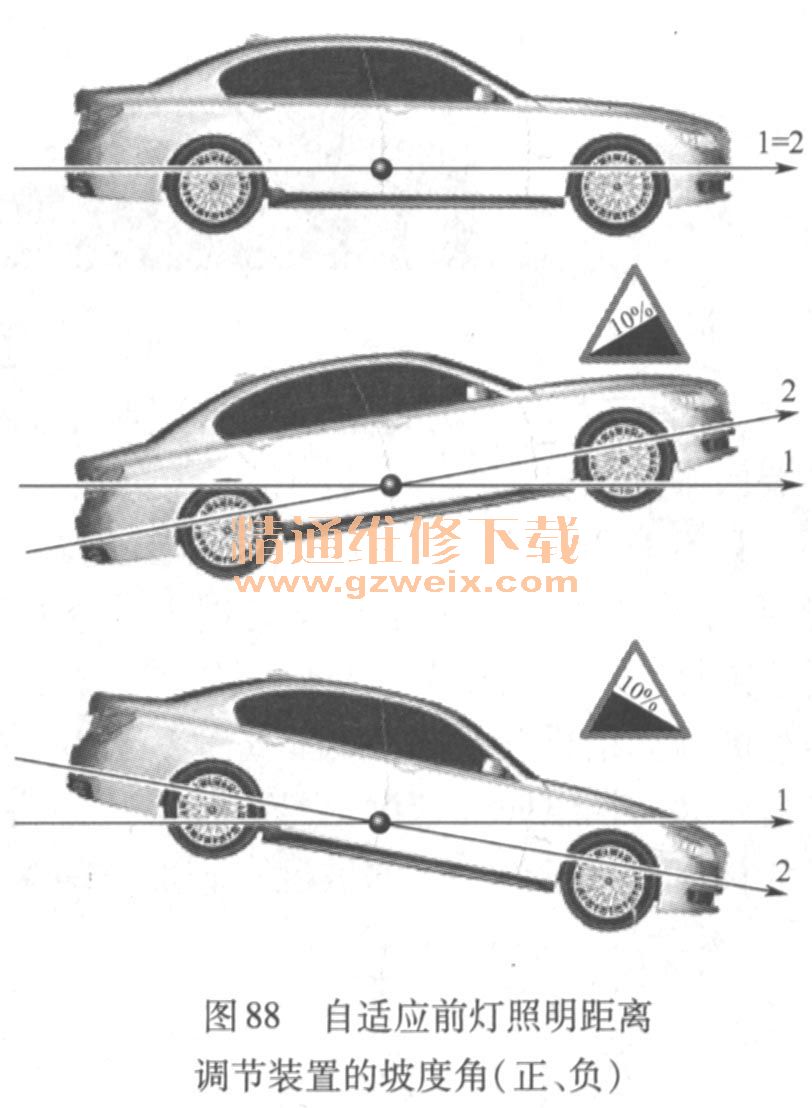
车辆高度传感器的信号也是计算参考数据之一。因此可在进行计算时考虑到因车辆负荷等造成的车身俯仰角。
集成式底盘管理系统包括测量车辆纵向或横向加速度的传感器以及偏转率传感器,通过F1exRay发送纵向加速度传感器和车辆高度传感器的数据。车速数据也由集成式底盘管理系统通过FlexRay提供,中央网关模块将这些数据从FlexRay传输到K-CAN2上,脚部空间模块通过K-CAN2接收这些数据。为了获得车速信号,通过动态稳定控制系统记录车轮转速传感器的信号。动态稳定控制系统将相关数据发送到FlexRay上,集成式底盘管理系统根据这些数据生成车速信号并提供给车载网络使用。
为了不造成眼部疲劳或引起驾驶人反感,系统持续平缓调节前灯照明距离。在不利条件下,自适应前灯照明距离调节装置可能会错误调节前灯灯光。这样可能会造成对面来车眩目。为了保护其他道路使用者,脚部空间模块会短时停用该功能。
满足以下条件时就会短时停用该功能:
①动态稳定控制系统的信号:制动防抱死系统调节干预;驱动防滑控制系统调节干预;动态稳定控制系统调节干预。
②集成式底盘管理系统内纵向加速度传感器的信号:纵向加速度非常高。
③动态前灯照明距离调节装置提供的脚部空间模块信号:恶劣路段识别功能报告路面不平。
5)远光灯辅助系统。远光灯辅助系统(FLA)可以在使用远光灯时为客户提供支持。远光灯辅助系统根据具体情况接通或关闭车辆的远光灯,因此可以在操作远光灯方面减轻驾驶人的负荷。远光灯也可以像平常一样手动接通和关闭。
远光灯辅助系统工作情况如下:
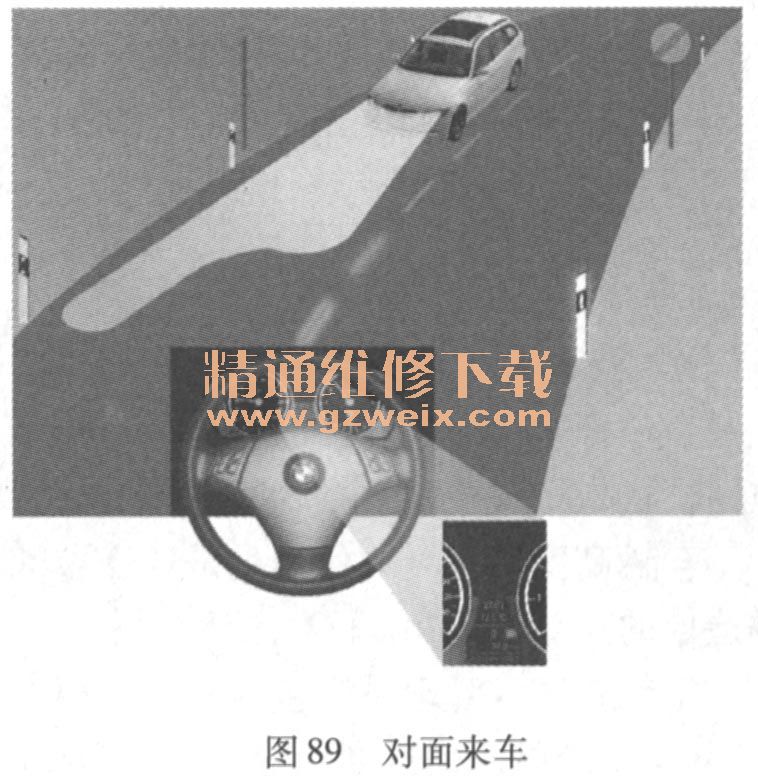
① 面来车。如图89所示,从对面来车方面来说,远光灯辅助系统必须能够区分反射光线的交通标志牌、其他光源和对面来车的前灯,其探测范围约为1000m。发现对面来车时远光灯辅助系统自动切换到近光。
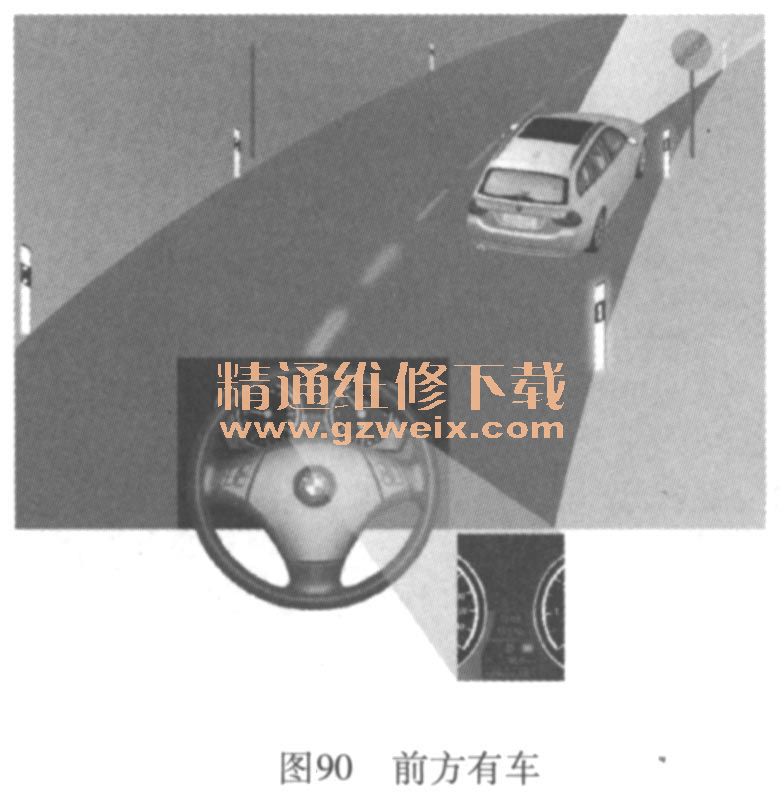
②前方有车。如图90所示,虽然与其他光源相比,前方车辆尾灯的照明亮度常常相对较低,但是FLA必须能够可靠识别到前方距离约400m处的车辆。发现前方有车时远光灯辅助系统自动切换到近光。
③不同照明情况。如图91所示,远光灯辅助系统在探测范围内探测到许多非特殊光源(交通标志牌、车道分界线等)时,FLA也会向车灯模块发送一个接通建议。此时系统使远光灯接通,远光灯辅助系统指示灯亮起。
④足够的照明亮度。如果车辆所处环境的照明亮度足够(图92),远光灯辅助系统就会向车灯模块发送一个关闭建议。其条件可能是:
a.白天。
b.环境亮度过高,如黎明。
c.有照明的地方。
d.道路照明,如路灯。
在某些情况下远光灯辅助系统将会向车灯模块发送关闭或接通建议,从驾驶人的角度来说这些建议显得不合逻辑。
出现下列情况时,系统可能达到其功能极限:天气状况非常不利(例如雾);照明光线反射效果较差的道路使用者(例如骑小摩托车的人、骑车者、步行者);个别驾驶情况(例如急弯、陡坡和洼地、左侧或右侧有车辆从直角方向驶来)。
受外观和高度所限,很难将某些交通标志牌与前灯区分开来,尤其是表示急弯的交通标志牌,远光灯辅助系统无法始终正确地判断出来。
")
")
")
")

