・上一文章:浅析激光打印机技术(上)
・下一文章:保时捷帕拉梅拉导航系统没有声音
四、自适应巡航定速控制系统(ACC)
自适应巡航定速控制系统(ACC):可以选装自适应巡航定速控制系统。它可使用雷达传感器来监控与前方车辆之间的距离,自动保持距离(如图5-1 -53所示),并且在与前方车辆之间的距离缩短时进行制动,如有必要会使车辆完全停止。可编程的车速范围在30~210km/h之间。
在自动加速模式下,自适应巡航定速控制系统(ACC)像传统巡航定速控制系统功能一样运行,并保持选定的目标车速(如图53所示)。但是,在斜坡上ACC也可通过启用制动系统或降挡功能保持车速不变。自适应巡航定速控制系统可减轻驾驶员根据动态交通状况调整目标车速的任务。该系统已从纯粹的巡航定速控制功能增强为距离控制系统。如果未检测到前方有任何车辆,则重置所需的车速。如果检测到前方有车辆,该系统会尝试尽可能与该车保持恒定的时间间隔(随车速调节的距离)。距离通过安装在前裙板中央的雷达传感器(频率为76~77 GHz的远程雷达)进行测量。与帕拉梅拉一样,新型卡宴的自适应巡航定速控制系统可为客户提供超车辅助、加速功能和入弯速度控制这些特殊功能。

超车辅助(如图54所示):不适用于美国、加拿大、中国和日本,在指示灯打开的情况下超车时,会从跟随模式转换到自由驾驶模式的过程中真正地执行加速度曲线到所需车速的改变。考虑到变更车道时的指示灯信号以及需要转换到加速模式,自适应巡航定速控制系统会提前中断跟随前面的车辆,并自动提高加速度(纵向动态性能)。

加速功能(如图55所示):如果实际车速低于选定的目标车速(例如在从静止状态开始起步时),则驾驶员可在该系统启用后随时启用“加速”功能。该操作可通过向上按住巡航定速控制系统操纵杆(恢复方向)完成。
入弯速度控制:在自由驾驶模式下车辆转弯时,如果超过特定的横向加速度,则入弯速度控制功能可进行干预。在车速较低情况下,系统干预通过转向角进行触发,例如在环状交叉路行驶时。因此,加速度会降低或中断,或者实际车速会降低,这样横向加速度也会降低。当车辆驶出弯道时,受到控制的加速度便会恢复,或者车速会以控制方式调整为目标车速(如果控制功能未中断)。“跟随停车功能”和保时捷“主动安全”功能在主动安全性方面得到了增强。
跟随停车:与帕拉梅拉一样,只要发现与前面车辆之间的距离缩短,该系统便会使制动器准备就绪,以便在需要时缩短制动距离。自适应巡航定速控制系统和PSM还会相互作用对制动系统进行预制动。在跟随模式下,如果前面的车辆停止,则后面的车辆会平稳减速至停止(自适应巡航定速控制系统的“跟随停车”模式)。自适应巡航定速控制系统计算得出的所需车辆减速由PSM通过主动更改车轮制动器处的制动压力进行调节,因此可保持驾驶员选择的与前方车辆之间的距离。为提高驾驶员舒适性,系统可在车辆最终停止前启用缓慢行驶阶段,这样如果前面的车辆仅是短暂地停止,则后面驾驶员自己的车辆实际上根本不会停止,能够顺畅缓慢地行进。该驾驶员可在停止后起步,或通过按下操纵杆或踩下加速踏板进行确认。
保时捷“主动安全”:在危险情况下,该系统还可通过视觉和听觉方面以及首次采用在短时间内产生制动震动的方式向驾驶员发出警告(如图56所示)。这可提醒驾驶员注意紧急情况。主动安全性功能独立于启用后的距离和巡航定速控制系统工作。但是,不会对静止障碍物做出响应。如果驾驶员没有对提前警告做出任何制动响应,不久之后会发出严重警告,这包括制动震动以及同时发出的声响和可视报警。通过短暂地形成制动压力对车辆施加制动震动。这还可确保驾驶员关注交通状况。在这种危险情况下,驾驶员仍可通过适当地做出响应防止碰撞。与自适应巡航定速控制系统结合使用,可在组合仪表的彩色显示器上显示自适应巡航定速系统显示内容以及全面的信息(如图57所示),例如目标和实际距离、所需的车速或前方行驶车辆的车速。在此模式下,彩色显示器中的车速条会显示当前使用了多少可用的目标车速范围(30℃210km/h)。控制操作启用后,时间间隔条、车速条、所需车速和车速表符号会显示为橙色。如果该系统仅打开(“待机”)但未启用,则指定的显示元素为灰色。操作状态通过ACC菜单中的组合仪表的彩色显示器显示。警告还会伴有声音信号。


注意:启用和关闭保时捷“主动安全”。可在多功能显示器中完全或部分关闭保时捷“主动安全”功能。在打开或关闭点火开关时会保存设置。
五、车道变换辅助系统(LCA )
新款卡宴首次采用了选装的车道变换辅助系统(LCA )。车道变换辅助系统是一个车辆辅助和舒适系统,它可通过保险杠左右两侧安装的两个雷达传感器监控车辆后面最远70m处的左右两侧的车道,包括盲点。这可增强驾驶舒适性和安全性,尤其是在高速公路上行驶时(如图58所示)。LCA可在车速范围介于30km/h和最大250km/h之间时使用。如果某车正处于盲点或正快速地从后方接近,则相应车门后视镜内的LED信息显示器会从两车相距55m时开始亮起(提醒阶段)。为此在两个后视镜中安装了4个LED(如图59所示)。如果驾驶员在这种情况下启用转向指示灯,则信息显示器会明亮地闪烁,从而为驾驶员提供清晰的有关接近车辆的警告(警告阶段)。


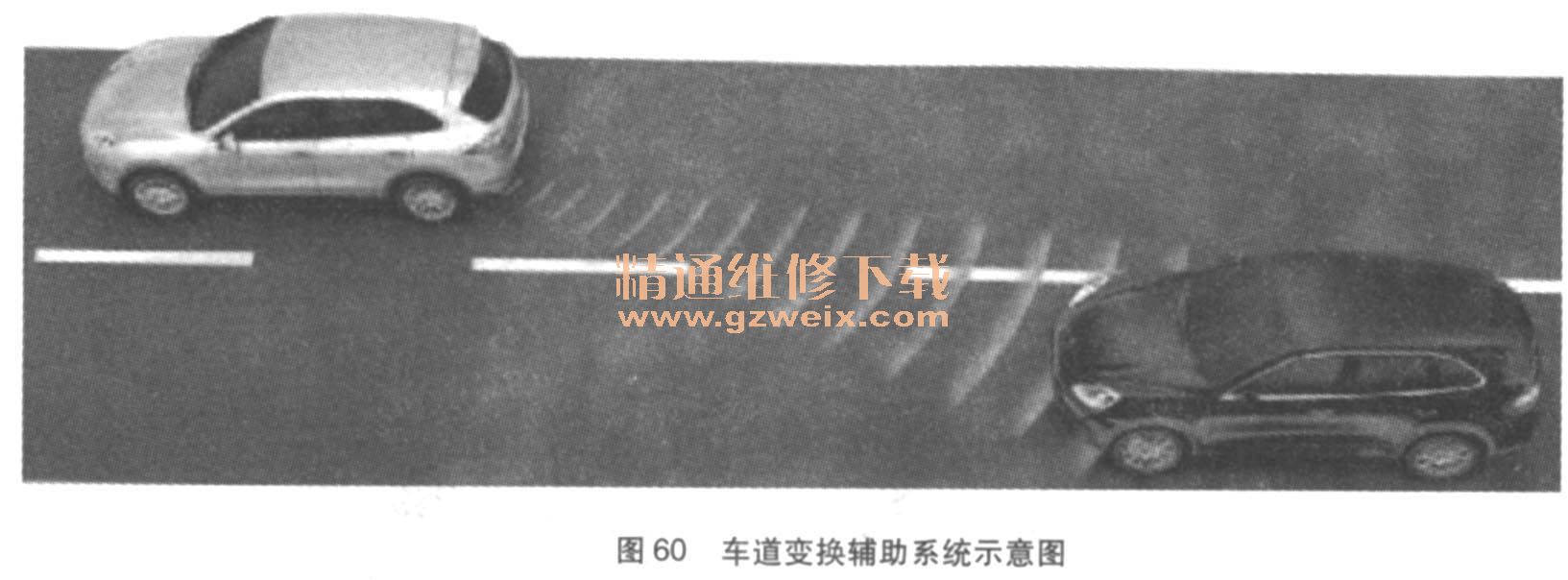
该信息分两个阶段提供:只要驾驶员未指示,指示灯就会在不同位置且不明显地指示在相邻车道检测到的车辆(如图60所示)。车道变换辅助系统可决定是否基于相对车速和距离显示车辆。但是,如果驾驶员设置转向指示灯,则指示灯会明亮地闪烁,从而警告驾驶员注意检测到的车辆。LCA不会对控制车辆进行主动干预,且可由驾驶员通过车门开关模块中的按钮随时关闭。通过LCA按钮启用LCA时,该系统可通过短暂地亮车门后视镜中的两个LED模块提供可视反馈。关闭LCA时,不会有来自该系统的任何反馈。
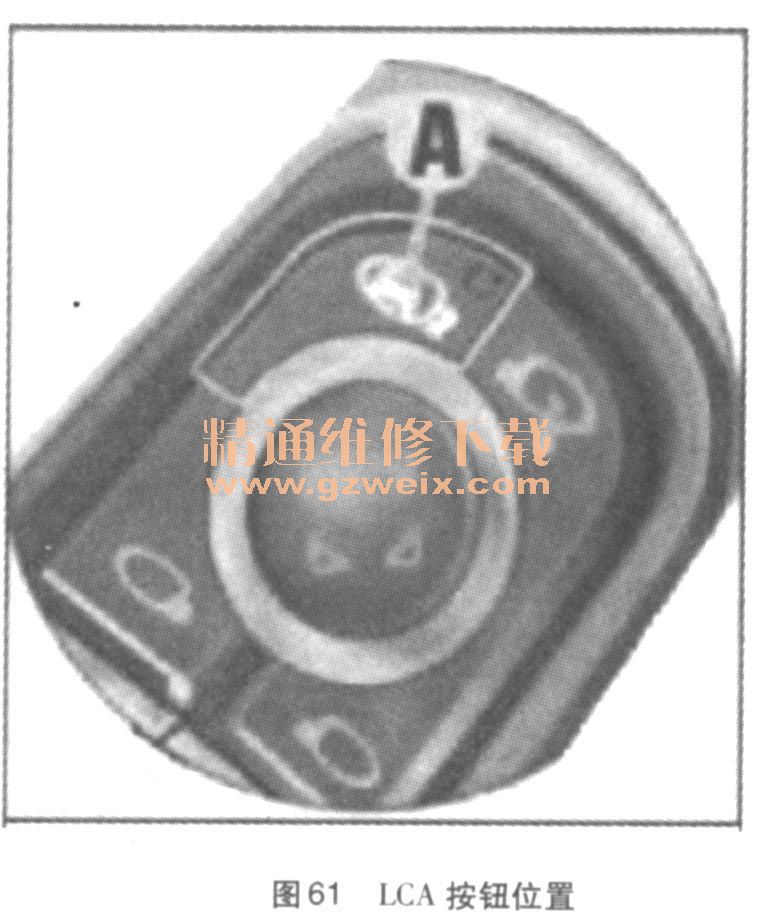
LCA启用状态可使用按钮面板(车门开关模块,如图61所示)中的功能灯读取。LED模块(信息显示器)的基本亮度可通过具有3个亮度级别的组合仪表中的菜单针对驾驶员要求进行调整。信息显示器的有效亮度取决于该基本设置且会随当前车外亮度同步调整。雷达传感器的作用范围很大程度上取决于天气情况。由于保险杠上有灰尘和/或恶劣的天气情况(有雾、在车辆后面喷雾等)或潜在的系统故障造成系统临时不可用通过组合仪表中的文本消息指示,且会导致系统自动关闭。雷达传感器可通过再次手动打开重新启用。
注意:在牵引拖车时将关闭LCA。该系统会保存上一系统模式(已启用或已关闭)以及针对特定键所选的LED亮度。
六、停车辅助系统
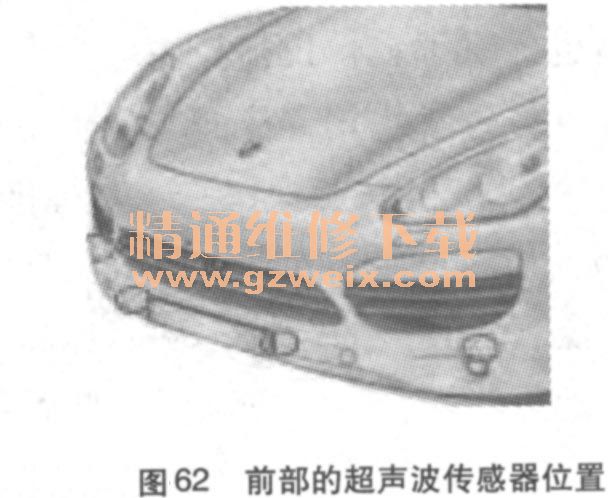
停车辅助系统:共配有8个传感器以及声响和可视报警系统的前后停车辅助系统是卡宴Turbo的标准配置,对于其他车型为选装配置(如图62所示)。工作范围介于0km/h到车速大约15 km/h之间。后部声响报警的声音比前部声响报警的声音低。当车辆靠近障碍物时,时间间隔会缩短,直至发出连续信号音。前部的声响报警从相距100cm时开始响起,后部的声响报警从相距120cm时开始响起。当与障碍物相距180cm时,则会显示一个初始警告音。如果至障碍物的距离未更改,则在大约8s后警告音会被抑制。如果车辆接近障碍物,则会再次播放声响报警。此外,至障碍物的距离会以车辆顶视图的示意图形式显示在中央显示屏中。会在车辆前后的探测区域中对探测到的障碍物进行可视表示。理论上,探测区域内与车辆前部、侧方和后部最大距离分别为120cm,120cm和180cm的障碍物均可显示出来(如图63所示)。基于传感器作用范围,会显示与车辆前部距离约60cm且与后部距离约70cm的位于两端的障碍物。系统确定的距离值经过过滤,从而使障碍物显示顺畅平稳。因此,处于静止状态时,直至大约2s后才会显示障碍物(与行驶时比较)。在点火开关打开后将会启用停车辅助系统。停车辅助系统可使用车顶控制台中的停车辅助系统“OFF”(关闭)开关关闭(此时按钮的LED亮起)。停车辅助系统会保持关闭状态,直至通过该按钮将其再次打开,或者关闭点火开关,然后再次打开。

七、倒车摄像头
选装的倒车摄像头(仅与PCM以及前后的停车辅助系统结合使用)更便于准确地进行倒车驻车和倒车抓车,且更便于挂接拖车。倒车摄像头可目视检测车辆后面的区域。镜头的打开角度,检测区域:水平打开角度131°,垂直打开角度100°,电源6.5V,电流消耗最大100mA。该系统可确定单独打开和关闭的条件,然后打开摄像头。挂上倒挡时或者如果该系统检测到车辆正在向后滑动,将启用显示输出。也可以通过PCM手动启用。一旦在驾驶员退出倒挡后车速超过15 km/h,或者如果接合变速器挡区P和/或接合停车制动器,将会关闭该系统。倒车摄像头集成在后盖的把手按钮中,且可将视频图像传输室位于后备箱右下饰板下方的摄像头控制单元(如图64所示)。
在摄像头控制单元中会均衡图像且会并入引导线(如图65所示)。然后会将图像传输至PCM。只有在电动停车制动器未接合的情况下才会显示图像。如果检测到拖车或后盖打开,则会显示视频图像,但不会并入引导线。如果需要,可在倒车摄像头图像中显示动态引导线。它们会对应于前轮位置进行更改。引导线通过当前方向盘位置说明了行驶路线,从而向驾驶员显示按照该引导线的当前设置通过方向盘操纵行驶的路线。此外,屏幕上的矩形彩色区域(从距离车辆40cm处开始,并延伸至约5m)表示车辆长度。在屏幕上显示倒车摄像头图像时会抑制电视声音(如果安装了电视调谐器)。音频源声音将会继续输出。显示图像时,语音控制将不可用。此外,停车辅助系统的顶视图显示内容可能会在来自倒车摄像头的图像输出上重叠。这种情况下,可通过触摸屏幕上的车辆再次显示和隐藏停车辅助系统显示内容。根据转向角,会在屏幕的左右边缘显示停车辅助系统。

")
")
")
")

