・上一文章:奥迪Q7经常出现无法启动现象
・下一文章:奥迪A8L仪表主动转向、ESP、气动悬挂灯报警
(1) 前高度传感器(如图6所示)
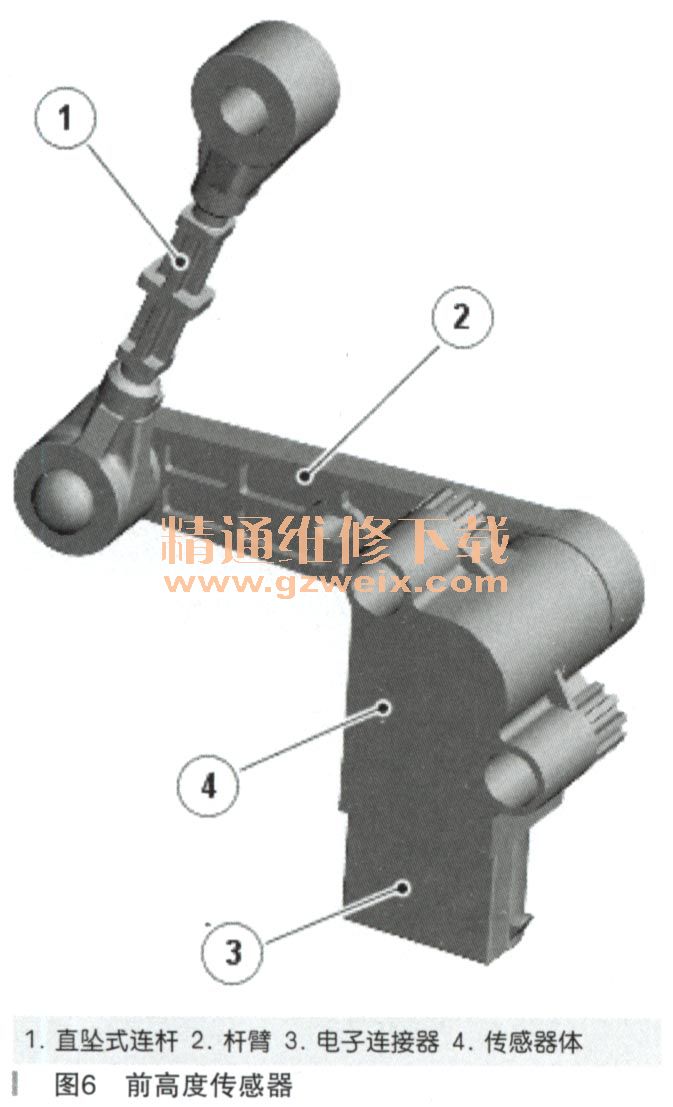
悬挂高度传感器测量车辆各角上的悬挂的竖向移位,并向集成式悬挂控制模块输出相应的模拟信号。集成式悬挂控制模块巾的算法计算信号的位置、速度和频率,并将这些结果用于车轮控制。

前高度传感器特性曲线图(如图8所示)标示了车辆高度相对于正常高度的变化与前高度传感器输出电压的关系。中间的曲线代表“标称”状态,但取决于公差,实际曲线可能处于上部曲线和下部曲线之间的任何位置。

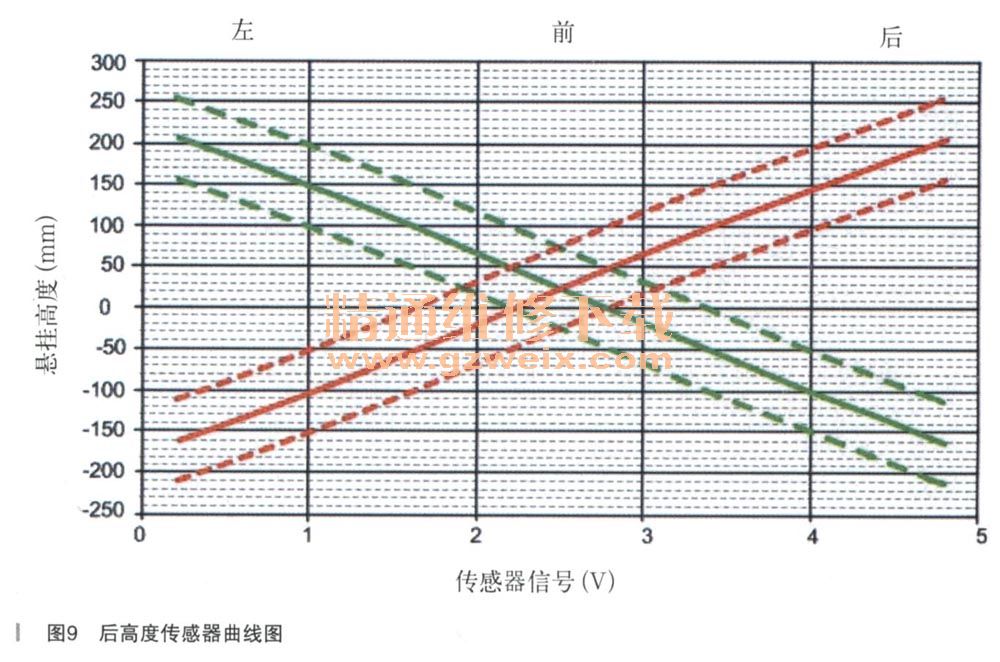
后高度传感器特性曲线图(如图9所示)标示了车辆高度相对于正常高度的变化与后高度传感器输出电压的关系。中间的曲线代表“标称”状态,但取决于公差,实际曲线可能处于上部曲线和下部曲线之间的任何位置。
(3)高度传感器校准
使用路虎公司许可的诊断系统来执行校准例行程序,以便读取车辆各角的位置,将设置记录在控制模块存储器中。一旦设置,就不需要执行校准,除非集成式悬挂控制模块已卸下或更换、空气传感器已卸下或更换,或者传感器连接的悬挂臂已卸下或更换。如果随后重新安装卸下的高度传感器,则必须执行校准程序,以确保系统的完整性。
如果装配更换的直坠式连杆,则需要进行校准。
感测元件包含一组霍尔效应装置,这些装置用于测量连接在传感器轴末端的小磁铁的磁场方向。随着传感器轴的旋转,磁铁的磁通量线也随之旋转。霍尔效应元件发出的信号由专用集成电路来处理,借以产生体现传感器轴旋转信息的输出电压。传感器的测量范围是标称位置±40°,标称灵敏度是57mV/轴旋转度数。如图10所示,随传感器在40°范围内及超出此范围旋转,输出信号重复变化的情况。

(四)操作
1.自适应减震控制图(如图11所示)

注意:A=硬接线;D=高速CAN(controller area network)。
")
")
")
")

