四、系统工作原理
雷克萨斯
混合动力驱动系统采用发动机和MG2两种驱动力,并使用MG1作为发电机。系统根据各种行驶状况最佳组合这几种动力。
HV
ECU持续监视SOC、HV蓄电池温度、冷却液温度和电气负载状态。在READY指示灯亮起且变速杆处于P位或倒车时,若任一监视项目不满足需要,则HV
ECU起动发动机来驱动MG1,然后为HV蓄电池充电。
混合动力驱动系统根据列出的车辆行驶状态最佳组合发动机、 MG1和MG2的运转来驱动车辆。
图11列出的车辆状况是典型的车辆行驶状况的示例。
 1.由MG2起动(B)
1.由MG2起动(B)
车辆起动后,仅由MG2提供动力(图12)。
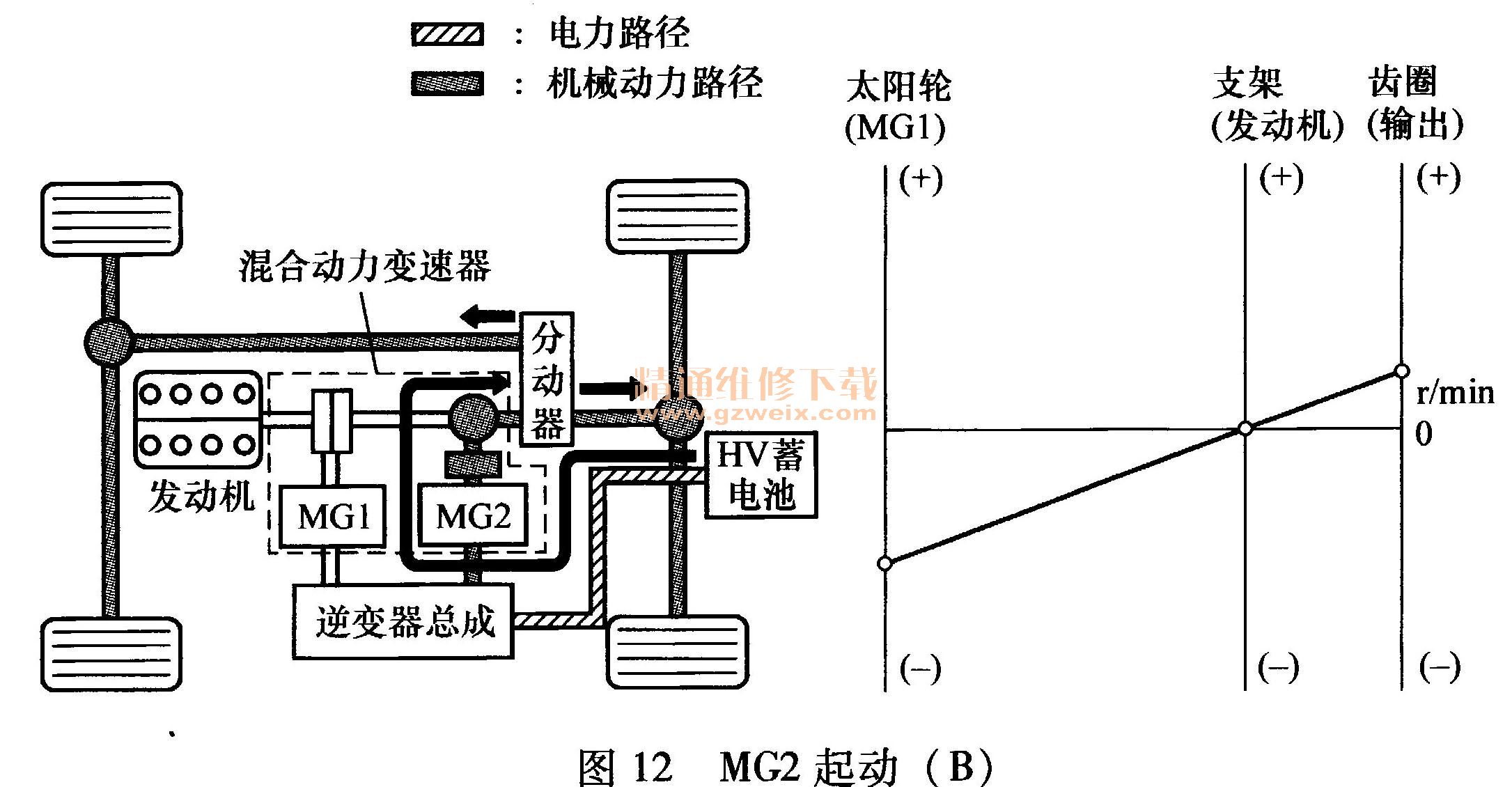
车辆在正常状态下起动时,使用MG2的驱动力(图12)。在此条件下行驶时,因未激活发动机,所以支架的转速为0r/min。此外,由于MGI不产生任何转矩,因此没有转矩作用于太阳轮。但是,太阳轮沿(-)方向自由旋转,以平衡旋转的齿圈(输出)。
2.通过MG2和发动机行驶(C)
仅通过MG2行驶时,若所需的驱动转矩增加,则激活MG1以起动发动机(图13)。此外,若HV
ECU监视的任何项目(如SOC、
蓄电池温度、发动机冷却液温度或电气负载状态)与规定值有偏差,则激活MGI以起动发动机。

仅通过MG2行驶,由MG1起动发动机时,转矩沿(+)方向作用于太阳轮(MG1) ,支架(发动机)沿(+)方向旋转以回应太阳轮传输的转矩。齿圈沿(+)方向旋转以回应支架旋转。
3.低负载和恒速巡航期间(D)
车辆在低负载和恒速巡航状态下行驶时,发动机的驱动力由行星轮传输(图14)。其中一部分驱动力直接输出,剩余驱动力用于MG1发电。通过逆变器的电力路径,将电能传输至MG2作为MG2的驱动力输出。若HV蓄电池的SOC级别低,则由发动机驱动的MG1对其充电。

图14是正常行驶状态下动力分配行星轮机构工作情况示例。太阳轮、支架和齿圈沿(+)方向旋转。发动机产生的转矩沿(+)方向作用于支架(发动机),使太阳轮和齿圈沿(-)方向旋转。MGI利用作用于太阳轮的(-)转矩产生电能。
4.节气门全开加速期间(E)
车辆行驶状态从低负载巡航转至节气门全开加速时,系统用来自HV蓄电池的电能为MG2提供驱动力(图15)。
为提高发动机转速而需要更多发动机动力时,相应齿轮的转速如图15所示改变。转矩作用于每个齿轮的方向与“低负载和恒速巡航期间”中的描述相同。
 5.减速行驶期间(F)
5.减速行驶期间(F)
车辆在变速杆处于D位减速期间,发动机停止且驱动力变为零(图16)。此时,车轮驱动MG2,使MG2作为发电机运行并对HV蓄电池充电。
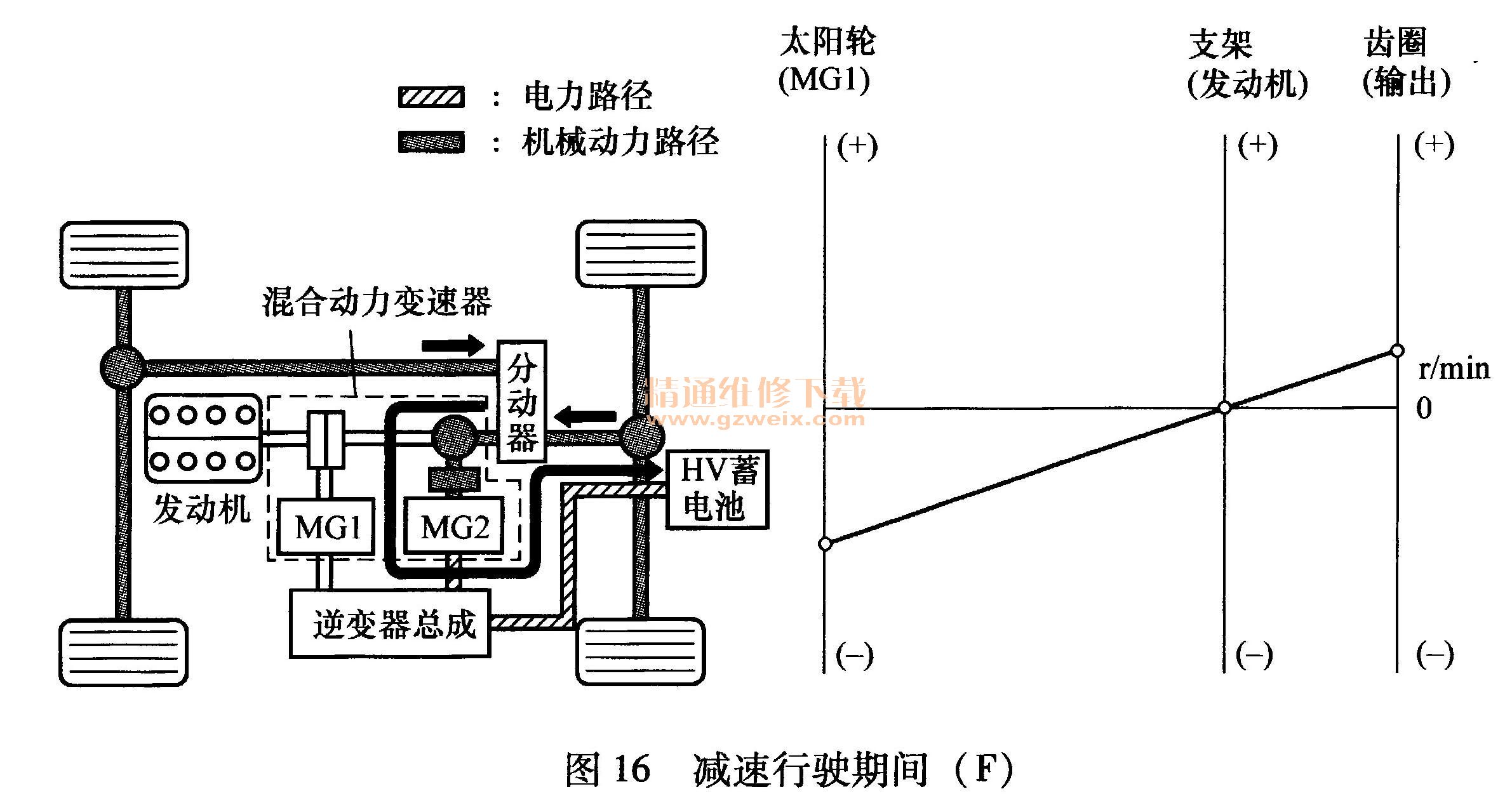
若车辆从较高速度开始减速,则发动机将保持预定转速而不停止,以保护行星齿轮机构。
减速期间,齿圈由车轮带动旋转。在此状态下,因未激活发动机,所以支架的转速为0r/min。此外,由于MG1不产生任何转矩,因此没有转矩作用于太阳轮。但是,太阳轮(MG1)沿(-)方向自由旋转,以平衡旋转的齿圈(输出)。
6.倒车期间(G)
车辆倒车时,所需的动力由MG2提供(图17)。此时,MG2反向旋转,发动机保持停止状态,MG1以正常方向旋转而不发电。
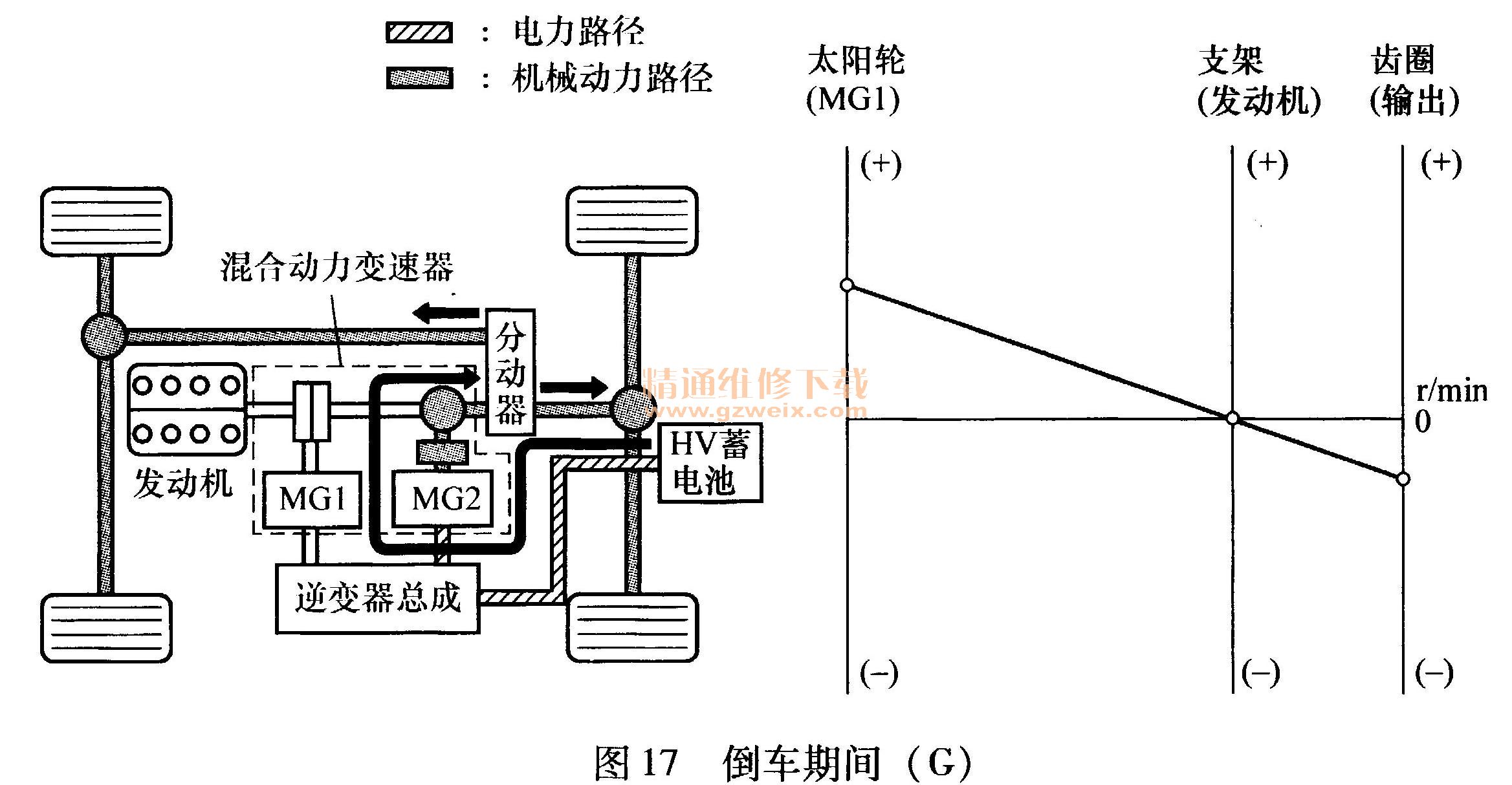
倒车期间,当SOC状态、
蓄电池温度、发动机冷却液温度或电气负载状态中的任一项达到规定值时,发动机可能会起动。图17表示发动机不运转时的情况。
行星轮的状态与“通过MG2起动和行驶”中描述的情况相反。因未激活发动机,所以支架的转速为0r/min,但太阳轮(MGl )沿(+)方向自由旋转,以平衡旋转的齿圈(输出)。
上一页 [1] [2] [3] [4] [5] [6] 下一页
")
")
")
")

