・上一文章:奥迪2. 8L 01J无级变速器加速时耸车故障
・下一文章:丰田车系技术通报五则
一、多路通信系统
2013款雷克萨斯ES350多路通信系统使用4种通信协议(CAN、 LIN、 AVC-LAN和MOST),以获得流线型线束配置。
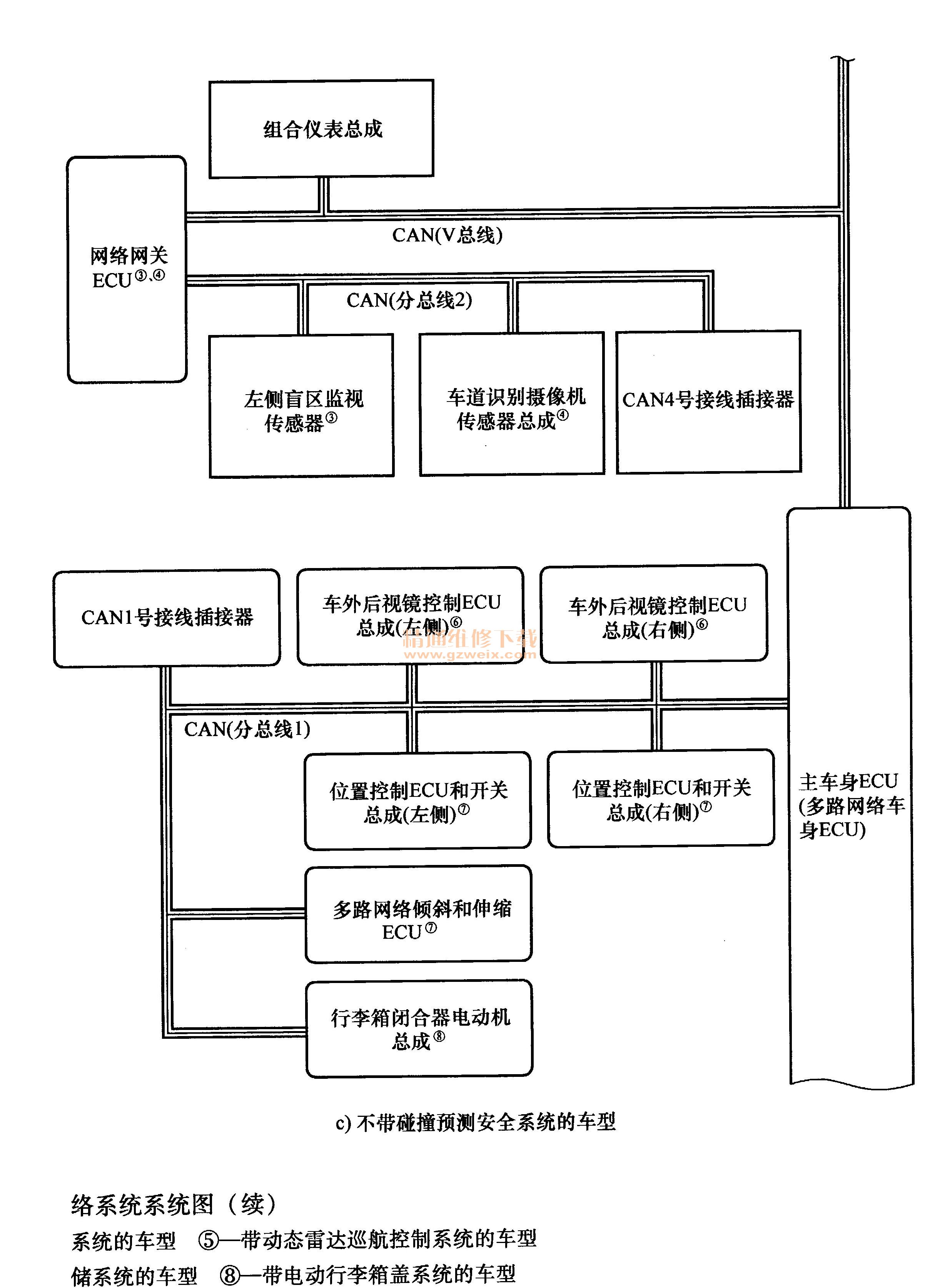
控制器区域网络(CAN):根据通信速度,CAN可分为两类。高速CAN(HS-CAN)用于传动系统、底盘和车身电气系统,而中速CAN(MS-CAN)用于车身电气系统。HS-CAN部分是指CAN V总线、分总线2和分总线13。网络网关ECU用于在总线间传输数据。MS-CAN部分是指CAN分总线1。主车身ECU(多路网络车身ECU)用于在总线间传输数据。
局域互联网(LIN) : LIN用于局域网,在该网络中系统具有分别用于各车身电气系统的LIN总线。
音频/视频通信局域网(AVC-LAN) : AVC-LAN仅用于音频和视频系统部件之间的通信。
媒体定向系统传输(MOST) : MOST仅用于音频和视频系统部件之间的通信。
由于传动系统、底盘和车身电气系统中引人了CAN通信系统,因此实现了流线型线束配置。
由于这些多路通信系统不兼容,因此CAN、 LIN、 AVC-LAN和MOST网络之间无法直接通信。
CAN、 LIN、 AVC-LAN和MOST为独立的网络,因此,某些ECU用做网关传送数据,允许CAN和LIN网络间进行通信。
采用了可定制的车身电气系统,从而可使用Global Tech Stream(GTS)设定ECU的某些控制功能。
一般来说,多路通信是指采用由位和帧组成的串行通信数据,以在不同ECU间交换信息,从而减少车辆的配线数量。位是用于表示信息量的基本通信单位。用二进制数“0”或“1”表示一位。CAN通信采用差分电压驱动表示二进制数“0”或“1”。差分电压驱动”可减少电干扰的影响(图1)。

CAN、 LIN、 AVC-LAN和MOST间的差别(表1):CAN、 LIN、 AVC-LAN和MOST间的协议(用于建立数据通信的规则)互不相同。若网络中的ECU使用不同的数据结构,如通信速度、通信线束或信号,则将无法相互理解。因此,必须在它们之间建立协议(规则)。与LIN和AVC-LAN相比,CAN的特点是高速数据传输。因此,与其他协议相比,CAN能以更快的速度传输更多数据。此特点可使数据准确地向传动系统和底盘控制系统传输。这些系统要求在短时间内传输大量数据。MOST用于实时传输控制信息、音频、视频和数据。

CAN和AVC-LAN通信采用双绞线。LIN通信采用一根车用乙烯(AV)线束。双绞线:此通信线束为双绞线。通过对两条线路施加不同的电压驱动通信,来发送单个信号。该系统称为“差分电压驱动”,可降低噪声。
AV单线:这是一种轻质单线通信线束,由外表包有绝缘层的单芯线组成。将电压施加到这根线上以驱动通信,该系统称为“单线电压驱动”。
屏蔽双绞线:此通信线束为屏蔽双绞线。通过对两条线路施加不同的电压驱动通信,来发送单个信号。该系统称为“差分电压驱动”,可降低噪声。
系统控制如图2所示




")
")
")
")

