・上一文章:东方红802-A型履带拖拉机底盘故障解析及排除
・下一文章:宝马编程器读写防盗电脑CAS数据时发动机不能启动
摘要:环境感知以及导航定位是无人驾驶汽车(以下简称无人车)技术的关键组成部分。针对驾驶环境进行定义和分类,提出与环境相互匹配的传感器组合方法。在此基础上,着重介绍传感器技术以及环境感知技术,比较各技术优缺点,并结合导航与定位对无人车组成架构进行概括介绍,并对未来无人车环境感知技术进行展望。
无人车作为一种智能化的移动交通工具,能够代替人类驾驶员完成一系列驾驶行为。无人车研究涉及环境感知、导航定位及决策控制等科学领域。通过环境感知,无人车获取相应的驾驶环境信息,这些信息可能包括道路信息以及天气状况等;导航与定位系统能够将无人车与环境信息相互匹配,使无人车“了解”自身的位置、速度、方向等信息;根据所获得的环境以及自身的信息,决策控制系统做出相应的决策,规划出行驶路径并最终控制无人车按照决策和路径进行驾驶。环境感知和导航定位是整个无人车系统中较为基础、关键的环节。环境感知中较为常用的传感器技术包括雷达技术和视觉技术,实际应用中需要结合天气状况对不同的传感器进行切换和组合;定位与导航通常由全球定位系统、惯导、电子地图匹配、实时地图构建和匹配、航位推算以及车身状态感知等技术完成。目前世界上主流的无人车主要采用激光、雷达、摄像头等传感器以及全球定位系统、惯性导航系统等技术方案。
1 环境与传感器选择
环境感知即指对交通环境的感知,一般来说,交通环境包括道路环境和天气环境。城市道路、乡村道路,结构化道路、非结构化道路,其较大程度决定了无人车行驶状况的复杂性,是无人车控制决策时需要考虑的因素。天气现象是指发生在大气中、地面上的一些物理现象。它包括降水现象、视程障碍现象、地面凝结现象、雷电现象、大气光学现象和其它现象等,气象学中对天气现象共有34种分类,不同的天气现象对无人汽车驾驶导航和安全也会产生重要影响。
1.1传感器介绍
尽管无人车的架构、功能与用途不尽相同,但就目前为人们所熟知的主流无人车来看,其所使用的传感器大致包括用于环境感知的毫米波雷达、激光雷达、摄像头等传感器,以及用于车身定位的GPS/INS传感器,而生产这些传感器的公司大致包括Velodyne、 Bosch、 Continental、 SICK、 IBEO以及Delphi等公司。
1)毫米波雷达毫米波雷达使用毫米波(millimeter wave),通常毫米波是指30~300 GHz的频域(波长为1~10 mm)。毫米波的波长介于厘米波和光波之间,因此毫米波兼有微波制导和光电制导的优点。同厘米波导引头相比,毫米波导引头具有体积小、质量轻和空间分辨率高的特点。与红外、激光、电视等光学导引头相比,毫米波导引头穿透雾、烟、灰尘的能力强,具有全天候(大雨天除外)全天时的特点。另外,毫米波导引头的抗干扰、反隐身能力也优于其他微波导引头。同时其存在的缺点是:大气中传播衰减严重,器件加工精度要求高。目前主流的毫米波雷达主要型号见表1。

2)激光雷达在无人驾驶汽车中,Lidar占的地位举足轻重,国内外很多高校以及公司在其自主研发的无人驾驶车辆中都使用了激光雷达作为环境感知的传感器。其优点有:①方向性好,波束窄,测角精度高。②采取专门的脉冲压缩技术,可把脉冲宽度压缩到几十纳秒(毫微秒)甚至皮秒(微微秒)量级,峰值功率可达几百兆瓦,从而大大提高测距精度。③激光雷达不受地面杂波干扰,没有多路径效应,故能在低仰角下工作。同时,激光雷达也有个最大的缺点:受大气的光传输效应影响(包括光速、折射率的变化和散射现象)会使其测量精度降低,因而不能全天候工作,遇浓雾、雨、雪天气无法工作;由于波束窄,在大空域中捕获目标困难,须借助引导才能进入自跟踪。目前主流的激光雷达主要型号见表2。

3)视觉技术目前,无人车常用的视觉技术一般包括红外摄像技术以及普通摄像技术。红外摄像技术照射距离远,画质细腻清晰,也更加经久耐用。红外摄像头工作原理是红外灯发出红外线照射物体,红外线漫反射,被监控摄像头接收,形成视频图像。从光谱学角度来讲,和普通摄像技术感知可见光原理类似。视觉感知技术中主要分为单目视觉、彩色图像以及立体视觉3种类型。目前主流的视觉传感器设备主要型号见表3。

1.2传感器选择
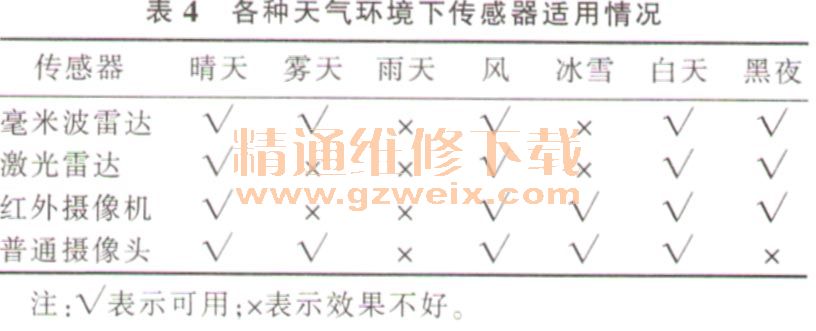
在选择具体某个传感器时,通常需要综合考虑其性能特点、价格、形状以及厂家供货周期等信息,在保证信息识别效果的同时提高性价比,并且最大化地使得无人车在外观上与原车型保持一致。在更复杂的情况下,还需要对天气现象进行了解和分析,我们需要关注的天气状况主要有雨、冰雪、风、雾、晴天等,对于白天黑夜,我们也需要考虑传感器在各种条件下的应用效果,以便针对不同环境都有有效的传感器能正常工作。因此我们首先调研了能用来分辨这些情况的传感器及其应用情况,然后给出通过传感器匹配实现不同环境下的精确探测。表4列出各种环境下传感器的应用情况。
而对不同天气的感知和识别也需要通过相应的传感器技术来实现。通常,晴天雨天的区分可以用雨量传感器探测出来,很多此类传感器也集成了温度、光线强度、雨雪等环境的识别;风速大小对车辆的正常运行影响较大,可以通过风速传感器来感知风速大小和方向,配合车辆运行状态,来区分车辆运动带来的风速还是外界环境带来的风速;浓雾会造成能见度降低,可通过摄像头、湿度和光线强度传感器等来识别;雪的探测在有些雨量传感器中已经集成,也可以通过摄像头、温度传感器配合探测;白天黑夜的感知,可以用光线强度传感器配合当地时间进行白昼区分。
")
")
")
")

