・上一文章:东方红802-A型履带拖拉机底盘故障解析及排除
・下一文章:宝马编程器读写防盗电脑CAS数据时发动机不能启动
2 定位与导航
无人车还需要通过定位系统准确感知自身在全局环境中的相对位置,以使无人车(看作一个质点)与环境有机结合起来。而导航技术则能够保证无人车(非质点)清楚地“知道”自己所要行驶的速度、方向、路径等信息。而实际应用中,需要通过信息融合技术实现定位与导航技术的组合,从而使环境信息与车身信息融合成为一个系统性的整体。
2.1导航技术
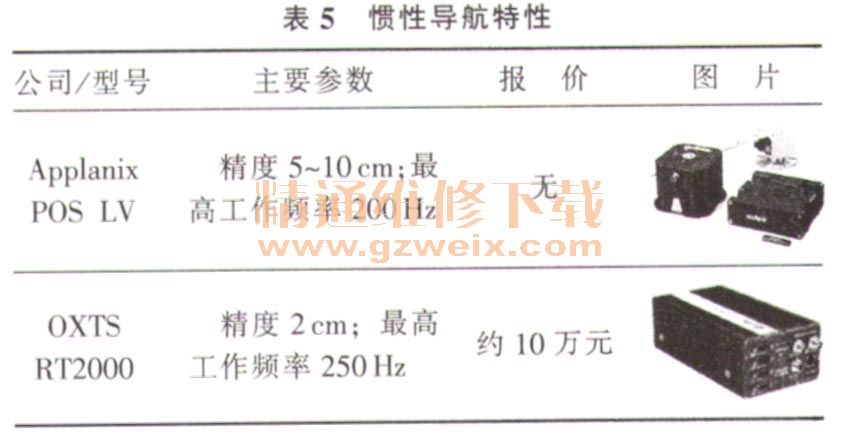
惯性测量组合(inertial measurement unit, IMU)是惯性导航的硬件基础,一般包含三轴正交的陀螺仪和三轴正交的加速度计,分别用来测量运载体的三自由度角运动和三自由度线加速度。导航计算机接收IMU输出的角运动和线加速度信息,经过解算后,实时、自主、连续地提供运载体的位置速度及姿态信息。根据惯性单元安装方式的不同,惯性导航分为平台式惯性导航及捷联式惯性导航,其中捷联式惯性导航系统又可分为有陀螺仪系统和无陀螺仪系统。目前主流的惯性导航设备主要型号见表5。
2.2定位技术
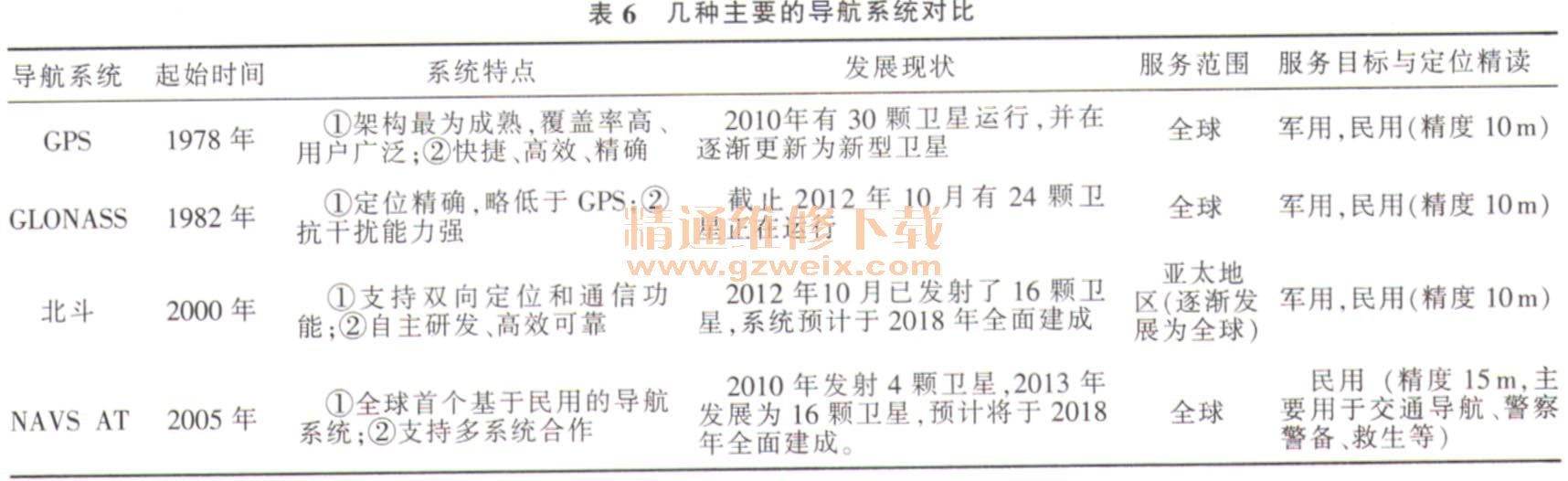
目前主要的卫星定位系统有美国军方的全球导航卫星定位系统(GPS );俄罗斯的全球轨道导航卫星系统(GLONASS) ;我国的北斗2代定位系统;欧洲空间局的NAVS AT(伽利略计划),其性能对比见表6。
2.3路径规划
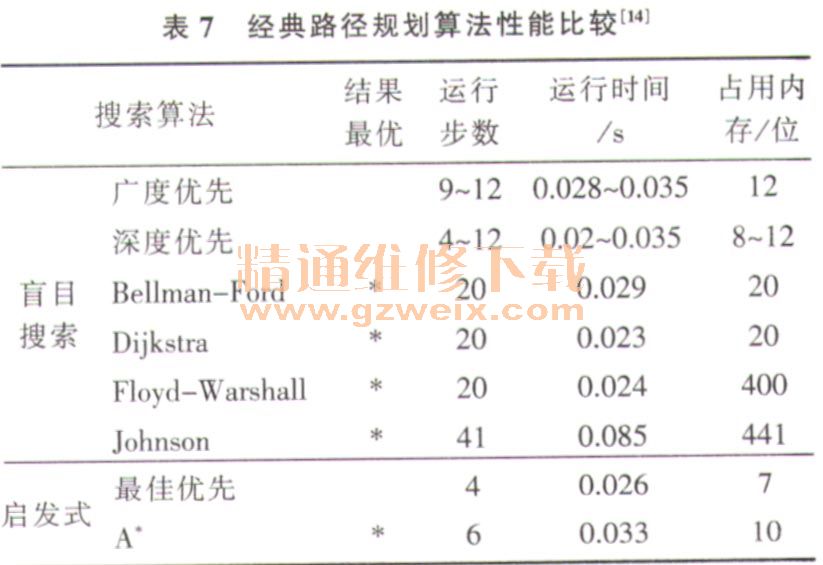
路径规划的影响因素有很多,主要包括如下几种:路段的长度、道路、速度、道路等级、交叉口的等待时间、交通管制信息等因素。这些影响行车效率的因素将以不同的形式体现在网络拓扑图相对应的数据库中,便于路阻函数的确定。道路的长度、速度、路段等级、交通口等待时间几种等是路径规划的主要影响因素,由于交通管制信息、路段抢修、道路施工等不确定性太大,而且可以在具体动态路径规划中体现出来,所以在宏观路径规划中一般不考虑这些因素。表7为经典路径规划算法性能比较。
3 中外各科研单位无人车传感器使用情况
传感器的安装与组合将直接决定着环境感知系统的能力和感知效果。在多数无人车中都使用了相似的传感器组合方式和传感器类型,当然在具体细节上也有所差异。最基本的原则是使用组合式的传感器,提供一定的冗余量和覆盖率,以满足在复杂环境中安全导航的需求。一般认为传感器的检测范围以及检测速度比其所获得的信息量更为重要,而由于视频视觉系统信息量巨大,所以多数高校的无人车会采用摄像头来识别交通标志、信号灯与停车线,适用于较为固定或者变化较慢的外界环境。激光雷达、超声波等传感器则用在了测量一些变化较快的环境信息,如障碍物、车道线、路面等。而谷歌无人车除了通过摄像机、雷达传感器和激光测距仪来“看”外界环境之外,还充分利用了谷歌街景地图的优势,使用详细的地图(通过手动驾驶车辆收集而来)来进行导航。部分院校、单位无人车传感器使用情况总结见表8。

4 结束语
无人车是一种智能化的移动交通工具,它能够代替人类驾驶员完成一系列驾驶行为,它涉及到环境感知、导航定位及智能决策控制等众多学科的研究领域。随着无人车技术研究的不断深入,环境感知与导航定位技术也越来越成为无人车发展和推广的关键所在。由于现在天气状况复杂多变,交通环境充满变数,无人车驾驶环境信息的准确及时的获取显得尤为重要。
根据以上调查和研究,同济大学也在逐步完善其自主研发的Danger(尖兵)号无人车驾驶系统。Danger号无人车在2014年11月1516日于江苏常熟举办的第6届“中国智能车未来挑战赛”上名列前茅,它采用的HDL-32-Velodyne Lidar激光雷达可以实现周围环境信息的检测,集成犯束激光发射器和32个激光接收器,3600的旋转,最高20 Hz的转动频率,每秒80万个坐标点的输出,这让32E Lidar激光雷达能够获取充足的环境信息。同时配备了一个Continental ARS308毫米波雷达,以实现移动障碍物的速度检测以及跟车等功能。在车身前后各安装了一个IBEO Alaxca A0四线激光雷达,以辅助HDL实现更立体的障碍物检测。在车身顶部则安装了一个SICK LMS510单线激光雷达,以实现道路的检测以及行人、自行车等辅助监测。同时,在车顶上还安装了2个PGF动态摄像头用来进行车道线、交通信号灯以及交通标识的识别。
目前多家公司已经宣布其无人车产品的上市时间,这无疑将拉开无人车商业化、普及化的大幕,而由于部分传感器的价格高昂,因此如何在安全高效、成本低廉的基础上构建出最优的传感器组合架构成为一个十分关键的问题。总之,传感器技术的研究将在很大程度上决定着未来无人车的发展状况。
")
")
")
")

