・上一文章:新能源车辆暖风和空调系统浅析(上)
・下一文章:CL125T-3水冷摩托车发动机温度上升过快
摘要:在无人驾驶车辆的开发与试验过程中,如何方便的切换人工与自主模式来完成不同的测试。针对这一问题,以NXP的犯位单片机K60为核心,开发出一套无线的无人驾驶试验车的嵌入式控制系统,能够方便的实现无人驾驶车辆传感器信号的采集与无线回传,并且可以通过无线方式实现无人驾驶试验车的模式切换。在开发与测试过程中,保证了试验环境的安全,并且为测试环节提供了极大的便利,对无人笃驶方向的发展具有重要的实践意义。
1 引言
随着电子技术的成熟与人工智能的不断进步,汽车的无人驾驶技术正在被许多科研院所、企业、高校作为战略项目进行深入研发。百度、Google起步较早,凭借其所具有的高精度地图、高GPS定位等现有技术,在开发过程中具有一定的优势。京东、顺丰等也成立了无人驾驶配货车的研发事业部门,全力打造未来快递的智能配送。同济大学、清华大学、上海交通大学、长安大学和武汉理工大学等高校也拥有无人驾驶研发团队。尤其在2016年,长安大学与教育部、中国移动通信集团公司、清华大学签署了共建车联网教育部-中国移动联合实验室,并在2017年10月完成占地28万m2m的长安大学车联网与智能汽车试验场,以提供专业的无人驾驶车辆的开发与测试环境,无人驾驶方向的研究正在如火如茶地进行中。目前,在无人驾驶车辆的研究中,各研究单位大部分都是通过对现有的车辆进行改装,在转向系统、制动系统和控速系统等方面进行升级,再借助激光雷达、毫米波雷达和双目摄像机等实现对环境的感知,通过GPS定位系统实现车辆的无人驾驶。本课题组长期从事无人驾驶方面的项目研究,具有丰富的无人驾驶车辆的改装升级经验,在无人驾驶车辆的开发与测试中,独立设计的无线的遥控与自主切换的无人驾驶车辆控制系统,能够采集车辆的传感器信号,并回传给遥控器,并具有通过遥控器实现车辆的紧急制动、遥控行驶和进入自主的无人驾驶模式等功能。在无人驾驶汽车的项目研究中,能够极大程度的保证开发与测试环境的安全,并且为整个开发与测试环节带来很多的方便,在无人驾驶车辆的开发和测试过程中具有重要意义。
2 控制系统总体设计方案
无人驾驶试验车辆一般由自动档配置的车辆改装而成,主控系统需要接收车辆行驶过程中的车速信号、转向信号、制动信号,并完成对控速系统、转向系统和制动系统的控制。在改装过程中,通过3个大力舵机完成机械方面的改装,车速的提取可以通过安装旋转编码器进行采集,再传递给主控系统。无线遥控系统包括模式切换部分、转向信号输入采集部分、控速信号输入采集部分、制动信号输入采集部分、监控显示部分和虚拟挡位信号输入采集部分等。主控系统与无线遥控系统通过SPI通讯实现全双工的信息传递。控制系统的框架如图1所示。
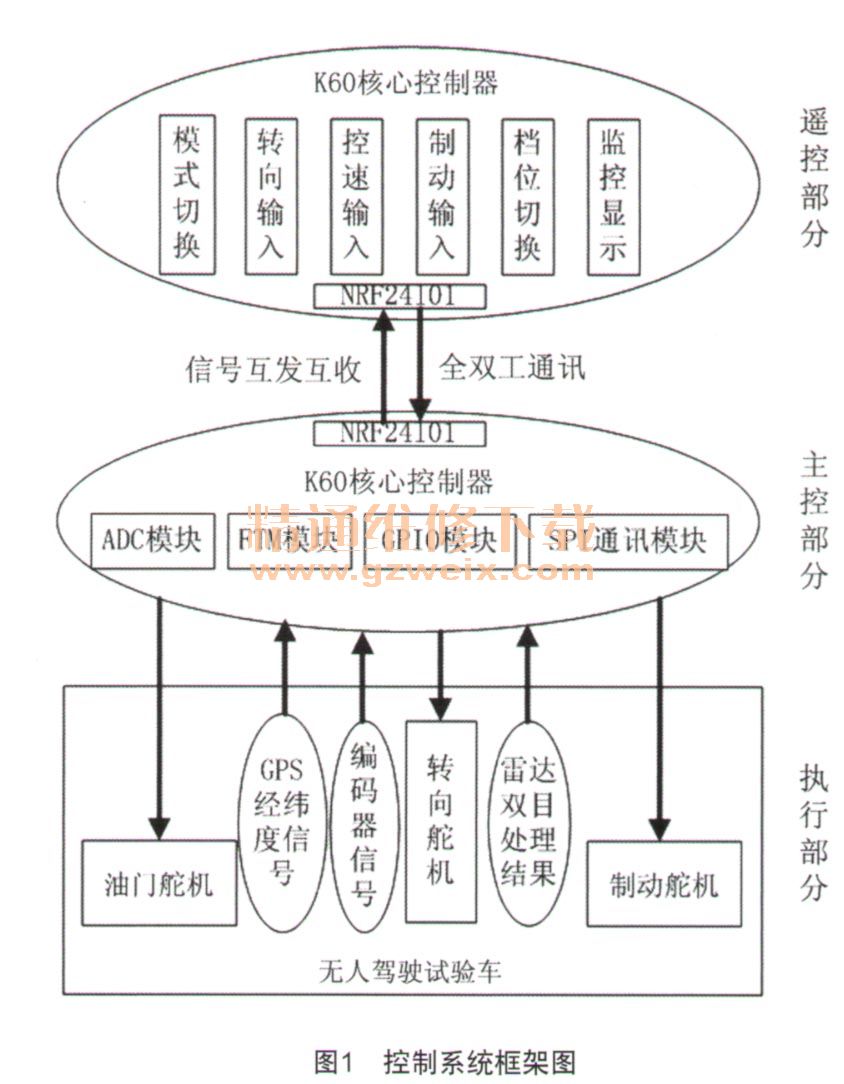
本次设计中主控系统与遥控系统都采用NXP的32位单片机K60作为核心处理器,主要用到K60的ADC模块、GPIO模块、FTM模块和SPI通讯模块等。主控系统与遥控系统通过NRF24101模块实现信息的互发互收。相互通信的信号包括:车速控制信号、转向控制信号、制动控制信号、故障紧急制动信号、遥控与自主切换信号等。

")



