・上一文章:劳斯莱斯幻影轿车防盗系统报警故障排除
・下一文章:车载氧传感器抗冷凝水应用技术
2 硬件电路设计与实现
2.1车身控制器最小系统设计
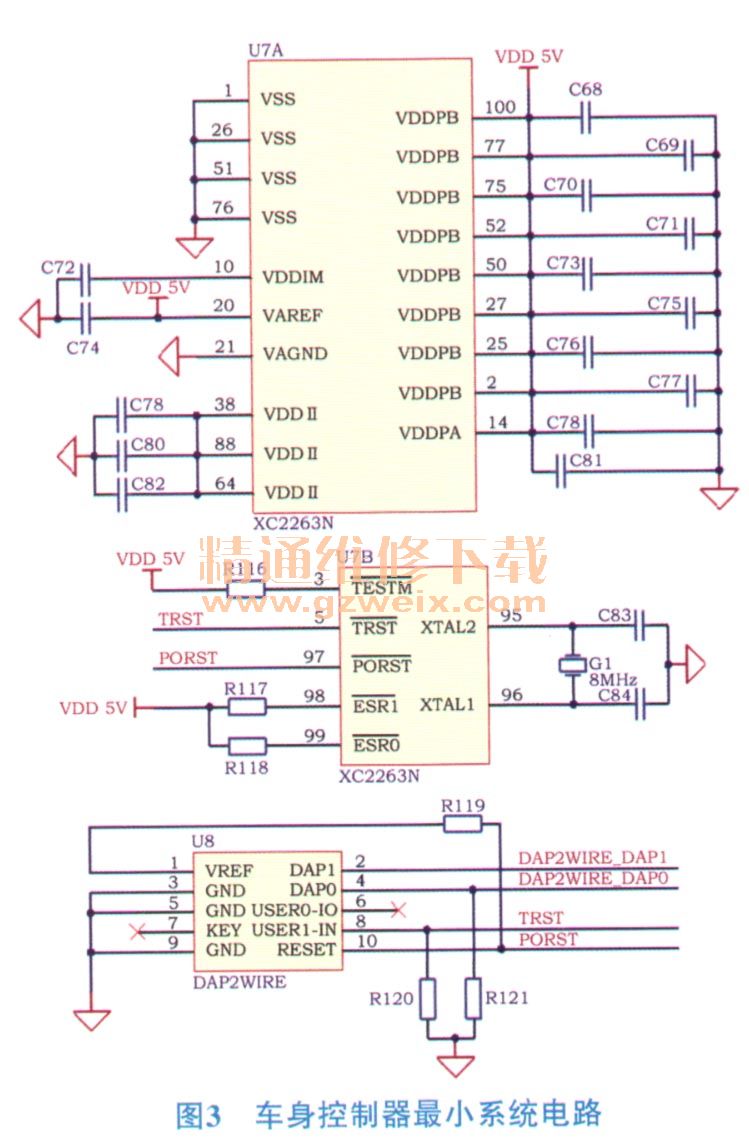
单片机最小系统对车身控制器至关重要,直接关系着控制器的性能和稳定性。本文根据XC2000系列芯片的特点,着眼于系统和市场发展前景,考虑设计方案的可行性和实用性,以系统可靠性为出发点设计了车身控制器最小系统电路图。车身控制器最小系统电路图如图3所示。
在选择微处理器时,需要考虑以下几个因素。
1)整车环境比较复杂,电源线、信号线的传导干扰以及空间辐射干扰比较严重,应当选择汽车级别的微处理器。
2)为简化硬件电路,提高系统的可靠性,要求微处理器自身具有数据链路层的功能,所以应当选择内嵌CAN控制器的微处理器,并且该CAN控制器支持CAN2.0B协议标准。
3)微处理器自身应当具有足够大的RAM、EEPROM和程序存储空间。
4)在整车休眠状态下,车身控制器的静态功耗电流应当尽可能的小,避免整车由于长时间静置而导致蓄电池馈电。
本例中,选择使用Infineon XC2263N芯片作为车身控制器的微处理器。该处理器属于XC2000家族,是具有32位处理器性能的16位MCU,其主频可以达到80 MHz,芯片内部有320 K的程序存储区和34 K的RAM存储区,具有16路AD采集和1路CAN。在Standby休眠模式下,静态功耗可以做到3mA以内,具有性能可靠、存储空间大和耗能少的特点,满足车身控制器的需要。
2.2车身控制器位置灯驱动和诊断电路设计
位置灯又称为示宽灯,俗称小灯,包括前位置灯、后位置灯、牌照灯和中控照明背景灯等,主要分布在汽车外侧周边轮廓。夜间行车时,位置灯不仅可以向驾驶员提供额外的照明,用以指示各种功能开关、旋钮的具体位置,还可以告知周边环境当前该车所处位置信息,对行车安全和驾驶舒适性至关重要。在功能规范的制定中,一般将位置灯的安全等级设为A级,在低压模式和高压模式下仍要保证位置灯正常工作。因此,本文对车身控制器的位置灯驱动进行了故障诊断,其电路如图4所示。
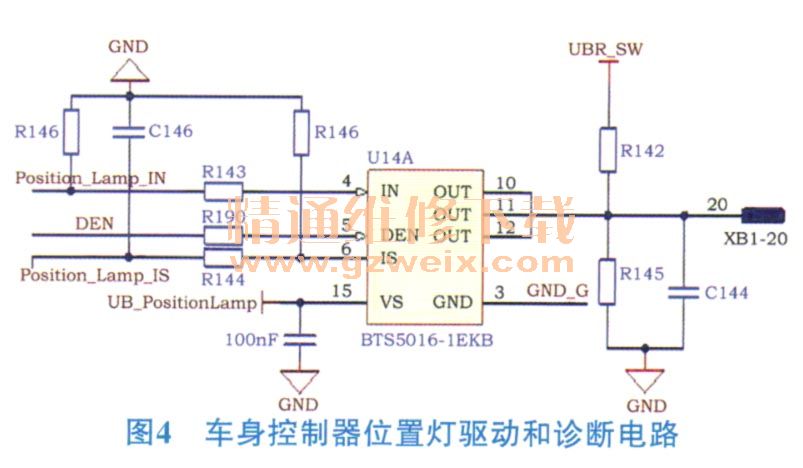
位置灯驱动采用Infineon BTS5016-1EKB智能开关高边驱动芯片。该芯片适用于阻性、感性和容性负载,特别适用于具有较高浪涌电流的负载。BTS5016智能驱动芯片可以利用反馈电流的大小并结合芯片当前工作模式,对负载的工作状态如开路、搭铁短路、对电源短路和过载进行检测。通过在电流反馈端串联电阻,可以将反馈电流转换为电压。微处理器通过AD采集并结合芯片当前工作模式对负载工作状态进行检测。反馈电压计算方式如下
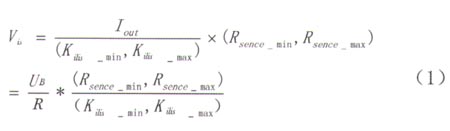
式中:UB----负载端电压;Vis----反馈电压;Iout----负载电流;Kilis----比例因子;Rsenc----反馈电阻(典型值为1.2 k Ω)。
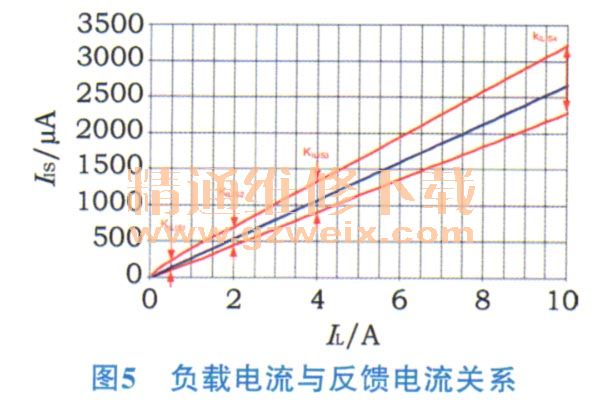
负载工作电流Iout与反馈电流之间的关系如图5所示。蓝色曲线代表理想Kris因子的值。红色曲线显示芯片在一定的温度范围内测得的kilis值。在制定策略时,必须将温度和电阻精度考虑在内。