・上一文章:劳斯莱斯幻影轿车防盗系统报警故障排除
・下一文章:车载氧传感器抗冷凝水应用技术
摘要:本文针对车身控制器故障诊断问题,以CAN总线作为数据链路,对车身控制器故障诊断系统进行设计,并基于UDS进行实现,以达到可靠诊断故障的目的。经过某车辆BCM故障诊断系统的实车试验,证明该系统具有诊断精准、鲁棒性强、运行稳定的优点,且具有广泛的市场应用前景。
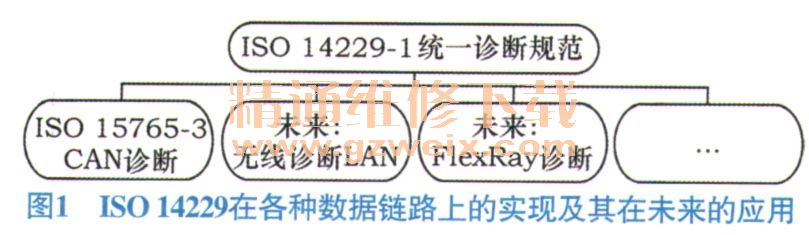
“中国制造2025”明确规定将汽车产业作为中国十大产业之一,重点发展智能车和新能源汽车。纯电动汽车具有零排放、能源利用率高、噪声小等诸多优点,成为未来新能源汽车发展的主要方向。但纯电动汽车控制器数目较多,且控制器之间的祸合性较强,所以对车载诊断系统的要求也越来越高川。车载诊断系统经过几代发展,从最初只针对排放系统的OBD诊断系统,发展到现在面向整车所有ECU电控单元的UDS(unified diagnostic service)诊断系统,已经被各大汽车厂商广泛采用。 UDS是基于OSI参考模型设计的,它只定义诊断服务,不涉及网络实现。它不仅可以应用于各种各样的数据链路网络,满足越来越多的网络总线需求,而且更易于车联网的实现。UDS诊断协议通过诊断服务不仅可以读取ECU内的动态数据、控制器配置信息和故障代码等,而且还可以对IO口进行操作,方便生产线检测设备的开发以及批量时产品的品质检验。ISO 14229道路车辆统一诊断服务(UDS)在各种数据链路上的实现及其在未来的应用如图1所示。
本文以车身控制器位置灯驱动为例,以ISO14229-1作为统一诊断规范,以CAN总线作为数据链路具体实现,通过对车身控制器位置灯驱动的硬件和软件进行设计,实现位置灯开路的故障诊断功能。
1 车身控制器故障诊断系统总体方案设计
基于UDS的车身控制器故障诊断系统需要实现以下功能。
1)按照给定工况,对负载工作状态和总线网络通信状态进行周期性检测,并在故障发生时,启动故障记录和故障处理功能,必要时需要及时切断负载,保护用电设备和车内人员的安全。
2)根据整车点火周期定义,在整车当前点火周期结束时存储历史故障,在下一个点火周期开始时读取之前的故障记录。
3)当故障消除时,车身控制器软件需要启动故障码清除逻辑。
4)诊断仪在线时,按照诊断仪的服务请求,清除DTC,并按照规定的时序和命令交互方式,上传故障数据。
5)根据数据库对ECU上传的数据进行解析并显示故障类型和故障状态。
本文研究的车身控制器故障诊断系统主要由故障检测系统和故障监测系统组成。故障检测系统由XC2000系列单片机最小系统、位置灯驱动电路和CAN通信电路组成,主要实现DTC的设置、存储、清除、数据组织和上传等功能。故障监测系统主要由CANoe和上位机组成,主要实现数据请求、故障码清除、故障码解析和显示等功能困。该故障诊断系统结构如图2所示。






