・上一文章:电动汽车--永磁无刷直流电动机技术
・下一文章:三洋32CA828液晶彩电电源电路原理详解
四、E PS的组成
EPS以前主要使用双线圈的转矩传感器,仅能检测方向盘的转向转矩,不能检测方向盘转动的角度和角速度,从而难以实现精确控制,所以其发展趋势倾向于将转矩传感器和转角传感器集成化,并采用非接触式结构,如磁环一霍尔式、磁环一磁阻式、光电式、微波式等传感器以适应汽车智能化和集成化的发展。
4.1传感器
(1)转矩传感器转矩传感器的作用是采集驾驶员施加在方向盘上的力矩大小,经过处理后输入给ECU。该信号是EPS的主要控制信号之一。
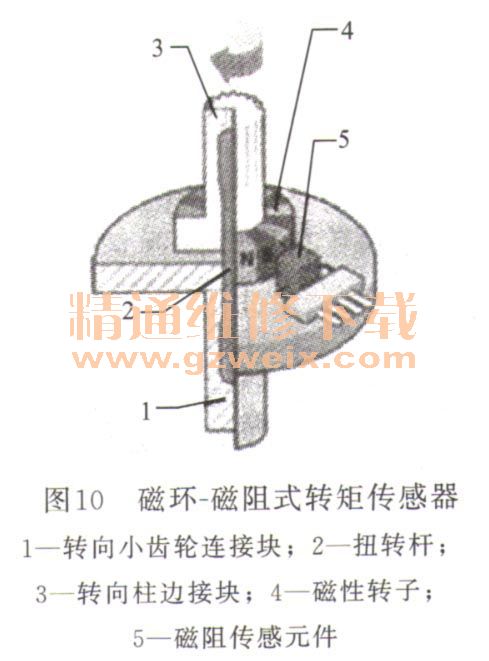
如图10所示为磁环一磁阻式转矩传感器,磁阻元件组成的集成电路作为传感头,信号轮是和转向柱同步转动的多极磁性转子。驾驶员转向时转向柱转动带动磁性转子转动,扭力杆(扭转杆)在转向柱带动下拖动小齿轮转动,近而推动齿条运动。因为转向时扭力杆的扭转使磁性转子与利用磁阻效应的传感头错开,从而通过磁阻元件的磁通量发生变化,这种变化经放大后输入到EPS ECU
(2)转角传感器转角传感器的作用是采集驾驶员施加在方向盘上的转向角度与角速度的信号,经处理后输入给ECU。该信号为EPS的主要控制信号之一。当该信号失效时,应急运转模式启动,由替代值代替,电子助力转向仍然起作用,只不过故障指示灯常亮。
转角传感器一般为光电式,利用光栅原理测量角度。光电式转角传感器的构成如图11所示,编码盘分为三层,最内环层和原理无关,中间层为均匀开口的信号盘,最外环层为不均匀开口的信号盘。光源在外层两信号盘之间。
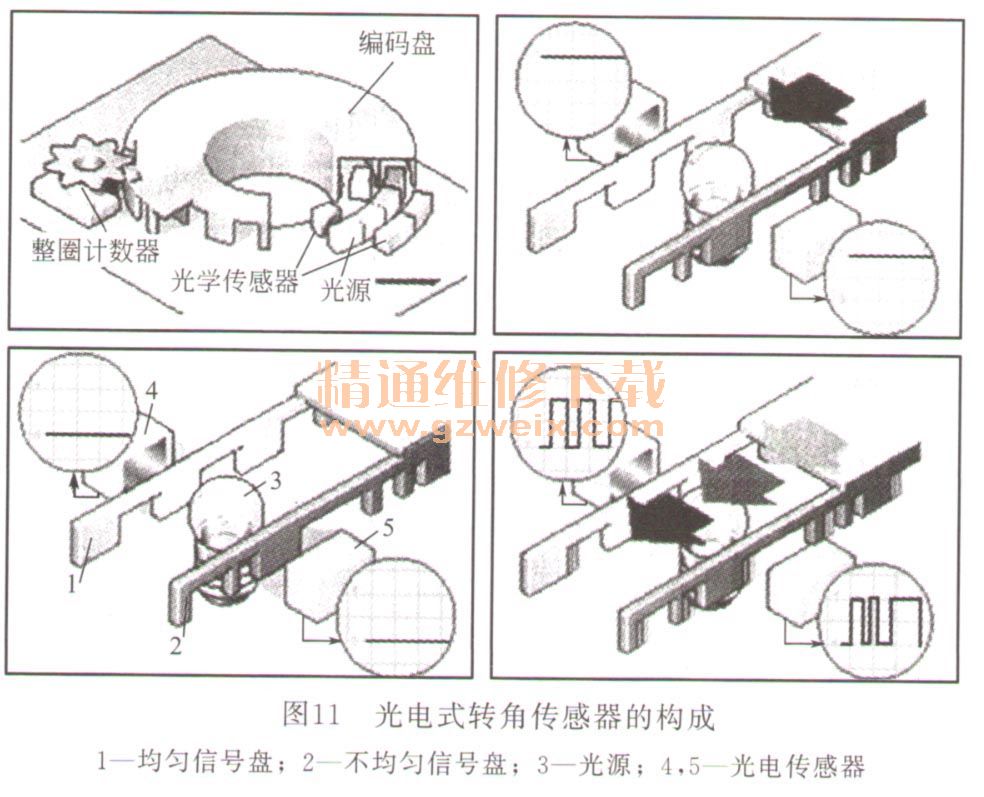
光束通过孔隙照到传感器上,产生电压信号。若光线被挡住,电压消失。因为中间层信号盘开日均匀转动时产生高低两个不同的电压序列,匀速转动信号盘则产生的电压信号也是规则信号。外层信号盘因为开口不规则生成不规则的高低电压信号。比较规则与不规则的两个信号,系统可以计算出模板移动的距离。由不规则模板确定运动的起始点。
ECU的输入信号除方向盘转角、方向盘转矩及车速等基本信号外,有的汽车还有汽车横摆角速度、侧向加速度、前轴负荷及点火等多种辅助信号,主要是为了判断地面附着力变化,修正转向电动机电流。
(3)电流传感器电流传感器位于EPS ECU板上,检测电动机回路电流,可以是电感式UI霍尔式。
")
")
")
")
")
