・上一文章:堆取料机胶带防打滑检测装置的适应性改进
・下一文章:轮胎式土方机械制动系统热衰减试验标准分析
1.故障现象
履带式全地形上程车是一种全天候全地形水陆两栖多功能车,能够快速通过雪地、沙漠、沼泽、山地、丛林、滩涂等复杂地形,可满足应急抢险救援任务要求。该车采用双节车体铰接式结构,2泵4马达行走液压系统,其中变量泵和变量马达采用EP(电比例)控制方式,电流和排量之间为线性关系,可通过控制电流的大小精确控制泵、马达的排量。履带式全地形工程车样车在顺利完成平路调试后,在爬坡测试时发生发动机熄火故障,之后多次爬坡均熄火,因此未能通过爬坡测试。履带式全地形工程车外形如图1所示。

2.原因分析
由于该样车多次爬坡测试时发动机均熄火,且未发现其他故障,故初步判断故障原因可能是该车爬坡时发动机负载过大,造成发动机熄火。我们分析行走液压系统控制器记录的试验数据,发现该样车在爬坡过程中,液压泵压力迅速升高,而车速和马达电流虽有小幅下降,却下降缓慢。根据功率平衡原理,发动机用于行走系统的功率等于液压系统压力、马达转速、马达排量三者乘积。此外马达转速和车速成线性关系,马达排量与电流值也成线性关系。因此在系统压力快速升高、马达转速和排量下降较小状态下,上述三者乘积过大,使行走系统所耗功率过大,造成发动机功率不足,导致发动机熄火。
3.改进方法
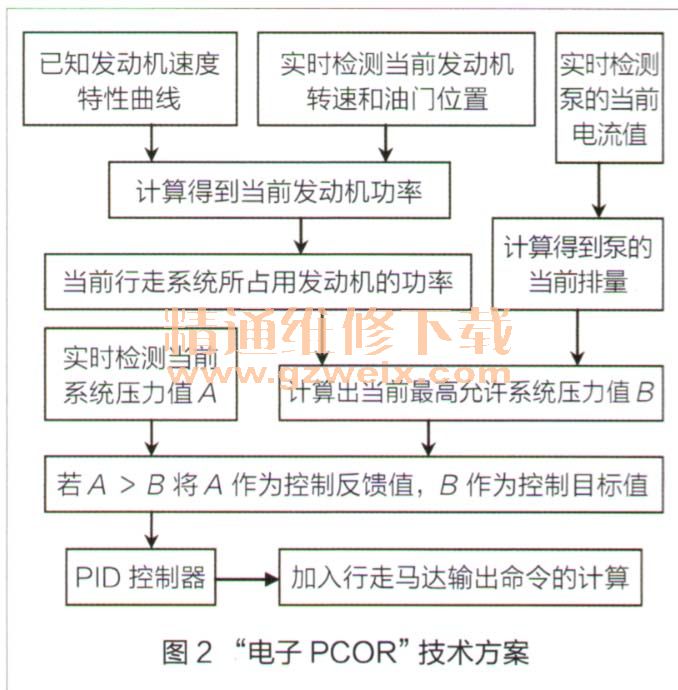
为解决履带式全地形土程车爬坡熄火问题,我们在其行走液压系统控制器中加入“电子PCOR”功能(Pressure Compensator Over Ride,即压力补偿越权)。“电子POOR”功能的原理为:当系统压力达到某一设定值时,马达排量不冉通过当前反馈量进行控制,而采取系统压力替代控制—加大马达排量,从而降低马达转速,使该车行走速度减慢、系统压力降低,从而实现发动机不熄火、该车顺利爬坡。其技术方案如图2所示。
4.改进效果
将“电子PCOR”功能加入行走液压系统控制器后,重新进行实际道路的长坡爬坡+平路高速行驶测试。由于发动机负载与车速、系统压力、马达电流直接相关,因此本文选取这3项数据进行试验测试,其试验测试结果如图3~5所示。

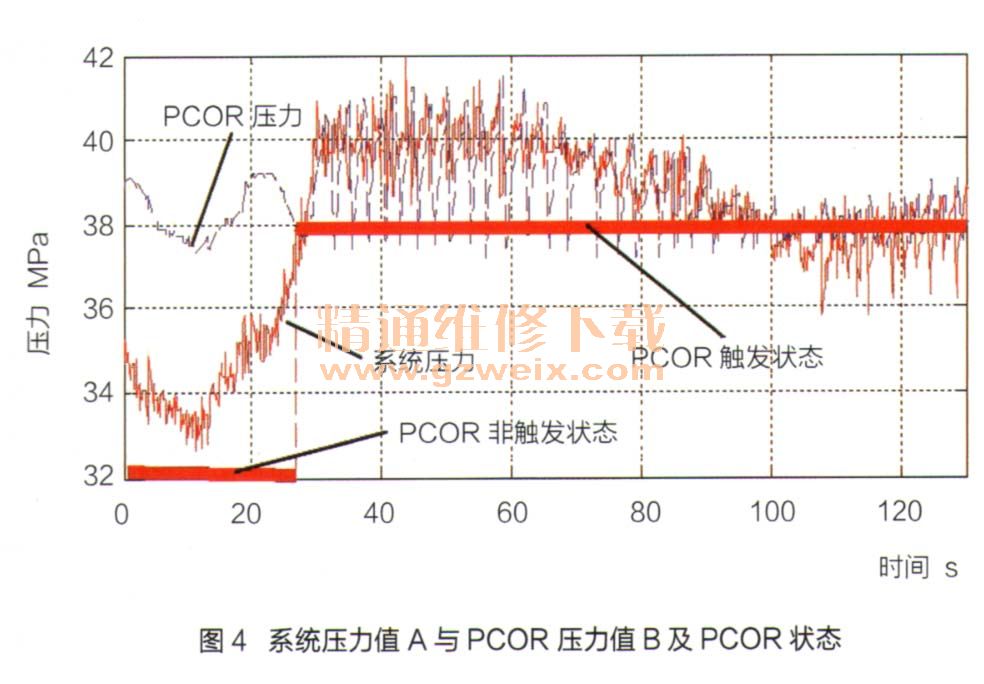
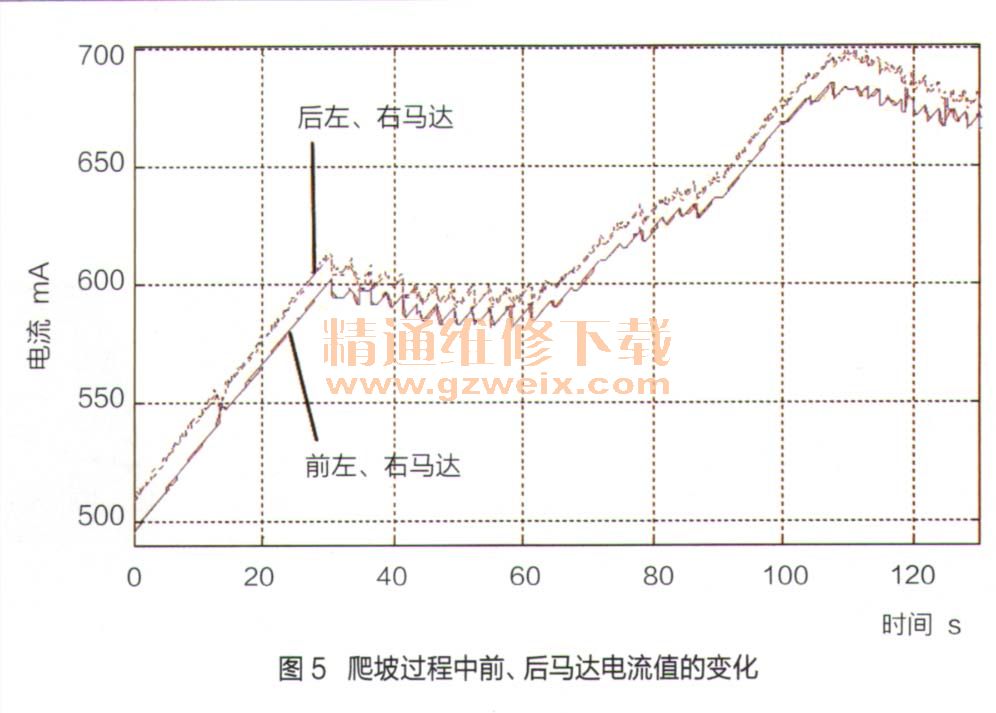
在爬坡准备阶段,随着发动机油门加大,车速逐渐提高;系统压力也在增大,但PCOR压力一直高于系统压力,故PCOR功能处于非触发状态(见图3)。前、后马达电流也近似直线上升,从而逐步加大马达排量(见图5)。
在稳态快速爬坡阶段,发动机油门一直处于最大开度,车速基本保持在37 km/h左右,直到爬坡即将结束时,由于坡道变缓,车速又迅速提高(见图3)。系统压力和PCOR压力同时上升至最大值,并且系统压力超过PCOR压力,PCOR功能触发(见图4)。前、后马达电流变化和车速趋势保持一致,即稳态快速爬坡阶段马达电流基本保持不变,平路高速行驶阶段马达电流又迅速拉升(见图5)。
在爬坡结束、进入平路高速行驶阶段,发动机油门仍一直处于最大开度,车速先是加快,达到最高速后车速又逐渐下降(见图3)。系统压力和PCOR压力均有一定程度的下降,并且系统压力在大部分时间内都超过PCOR压力,PCOR功能基本始终处于触发状态,使得实际车速超过设计最高时速60 km/h只经历一短暂时间后就回复设计值,从而也保护行走液压系统正常稳定工作(见图4)。马达电流和车速二者变化趋势仍然保持一致(见图5、图3)。
通过完成该履带式全地形工程车样车实际道路快速行驶测试,以及顺利完成60%极限爬坡测试,表明“电子PCOR”功能可满足其各种工况要求,达到了设计指标要求。





