・上一文章:数控设备的清洁化改造
・下一文章:发动机活塞连杆组的装配技术探讨
4 电机转动控制
根据实际情况,智能小车循迹行驶在直道、入弯道前、入弯道后,行驶速度应该有所不同,这样才能使智能小车稳定有效快速地循迹行驶,该方案对电机的运动控制采用增量式PID算法,实现对电机的闭环控制,将速度的偏差作为控制电机脉冲宽度调节信号占空比增值的输入量〔’〕,脉冲宽度调节信号占空比增值由公式5计算得出。

上式中p表示第n次脉冲宽度调节信号占空比增值;Vn、vn-1、vn-2等分别表示第n、n-1、n-2次速度差值;kp、Ki、kd等的值,依据满足智能小车运行稳定的需要,从而确定合适的值。
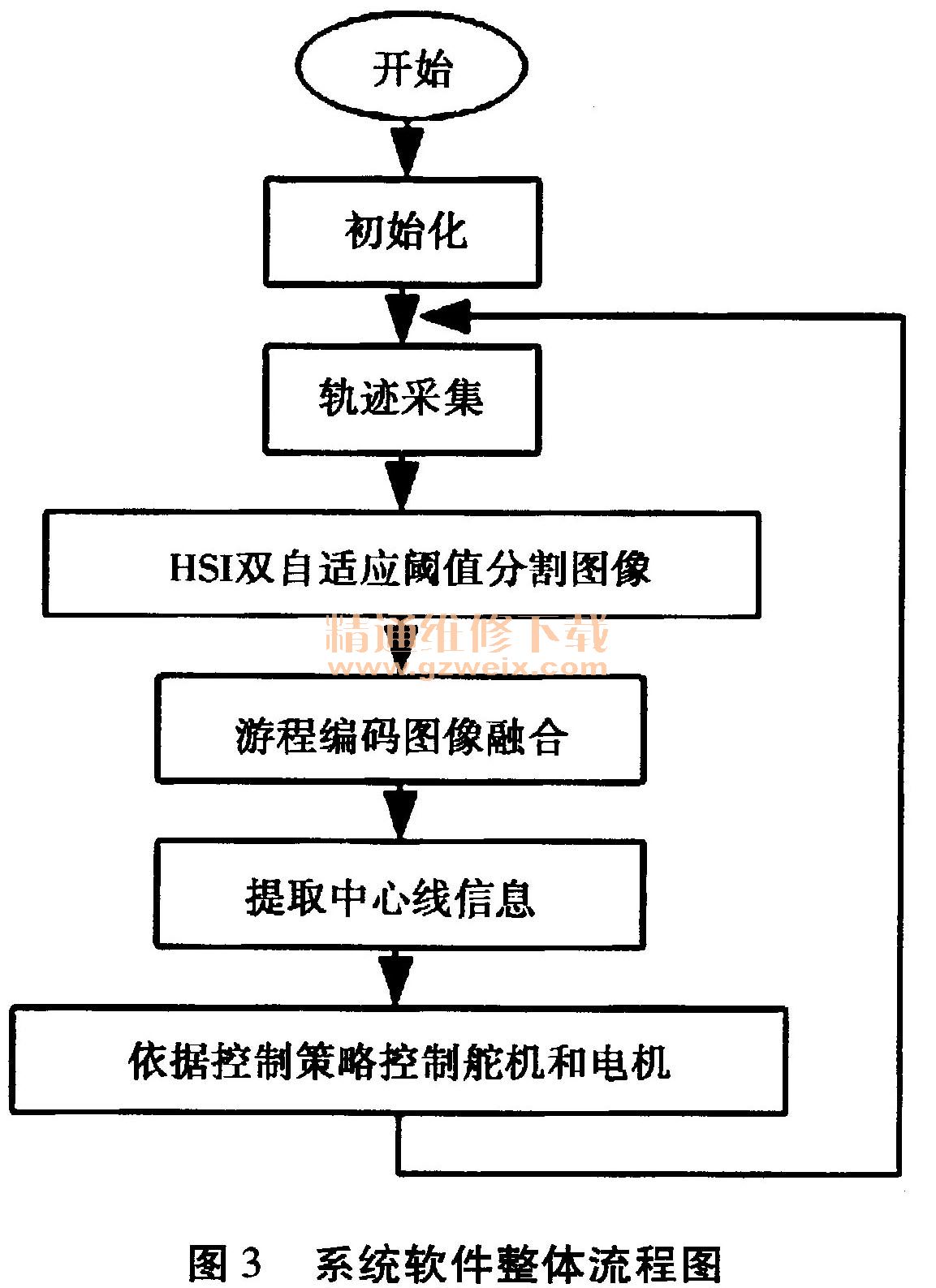
5 系统软件总体设计
该系统软件采用C语言进行编写,系统软件整体设计流程图如图3所示,对图像的处理以及按照控制策略对舵机和电机的控制是该软件设计核心的部分。
6 总结
本文设计一种智能循迹小车,通过HSI双自适应阑值分割法处理轨迹图像,经游程编码技术获取轨迹的中心坐标信息,利用增量式PID算法实现对智能循迹小车的灵活控制,经验证,该方案能使小车稳定快速行驶,对研究智能车辆有一定的参考价值和意义。





