・上一文章:数控设备的清洁化改造
・下一文章:发动机活塞连杆组的装配技术探讨
摘要:设计一种智能循迹小车,采用Kinetis60单片机作为主处理器,利用OV7620摄像头获取轨迹图像信息,通过HSI双自适应闲值分割法处理轨迹图像,经游程编码技术得到轨迹的中心坐标信息,获取引导线。然后利用获取的信息,结合增量式PID算法实现对舵机和电机的灵活控制,从而让智能小车循迹行驶。
0 引言
智能小车是机器人大家庭中的一员,它是典型的机电一体化产品,智能循迹小车具有环境感知、自主决策、自动行驶等功能,汽车的高智能化是未来汽车领域发展的一个趋势,同时它的发展也渗入到社会的各个领域。本文设计一种智能循迹小车,采用Kinetis60单片机作为主处理器,利用OV7620摄像头获取轨迹图像信息,通过HSI双自适应IA值分割法处理轨迹图像,经游程编码技术获取轨迹的中心坐标信息,然后利用获取的信息,结合增量式PID算法实现对舵机和电机的灵活控制,从而让智能小车自主循迹行驶。
1 系统整体方案设计
该智能循迹小车的硬件系统主要由主控模块Kinetis60、电源模块、图像采集模块、舵机转向模块、电机驱动模块、无线通讯模块、车速检测模块等构成,系统整体方案设计框图如图1所示。
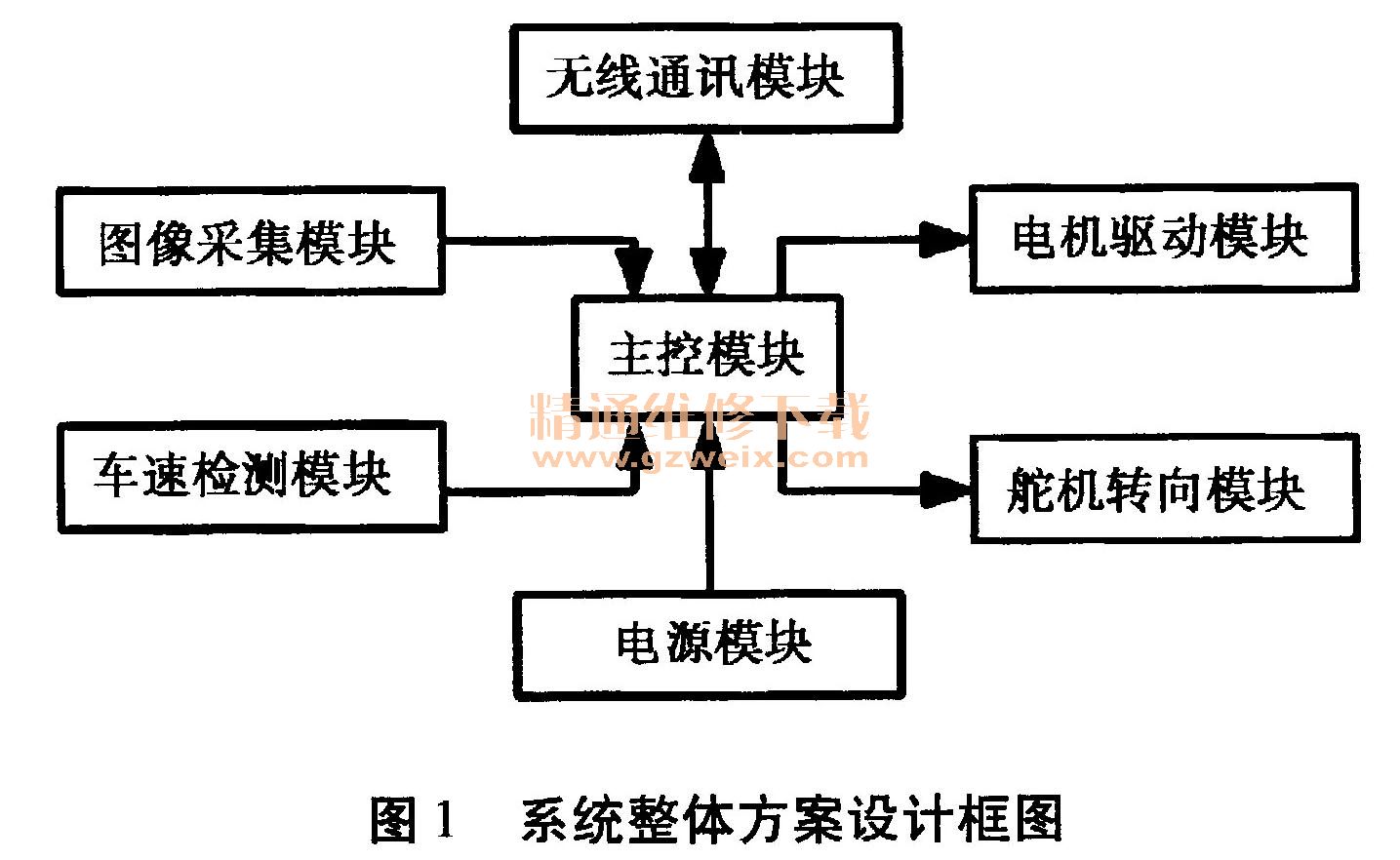
图像采集模块通过OV7620摄像头获取轨迹图像信息,然后采用HSI双自适应阂值分割法经主控模块处理,利用游程编码技术可以获取一些用于对舵机和电机控制等有用的信息。该智能循迹小车采用舵机转向机构,从而使智能循迹小车的转向更灵活,通过车速检测模块检测电机转速,采用增量式PID算法实现对电机的灵活控制,从而让智能小车自主循迹行驶。
2 图像采集及处理
在视觉系统中,大多采用CCD作为摄像输入系统,该智能循迹小车采用OV7620摄像头采集轨迹图像信息,该摄像头具有CMOS彩色/黑白图像传感器,其典型的数据输出格式为RGB,该方案采用CMOS黑白图像传感器,这样可以避免处理器处理能力不足的问题。
2.1图像分割
在对图像处理中,广泛使用的色彩空间有HIS、YUV、RGB等,若采用RGB颜色模型,可以直接使用OV7620摄像头的输出值,而不需再换算,可以保证系统的实时性。然而,由于RGB颜色值分布很分散且三个分量相关性较高,造成不容易确定识别RGB的阂值范围,导致对轨迹识别不准确。
该方案采用色调和饱和度作为主要识别参数,这样能够提升识别的准确性。由于亮度I决定了饱和度S,那么根据亮度I的等级来对饱和度S的值进行动态调整,调整后的值为S,从而实现对图像的分割。因此,该方案选用HSI模型作为轨迹识别处理的基础,选取其中的参数色调H和饱和度S作为轨迹识别处理判断依据。满足下列约束条件的即为目标轨迹的像素:
Hmin<H<Hmax
Hmin为色调的下阈值;Hmax为色调的上阈值。
Smin±S′<S<S .ax±S′
Smin为饱和度的下阈值;Smax为饱和度的上阈值;S′的值由I的等级确定。
2.2提取引导线
经过上述方式提取到轨迹图像的目标像素后,采用游程编码技术对目标像素进行区域融合,其过程分为三个阶段,如图2所示。
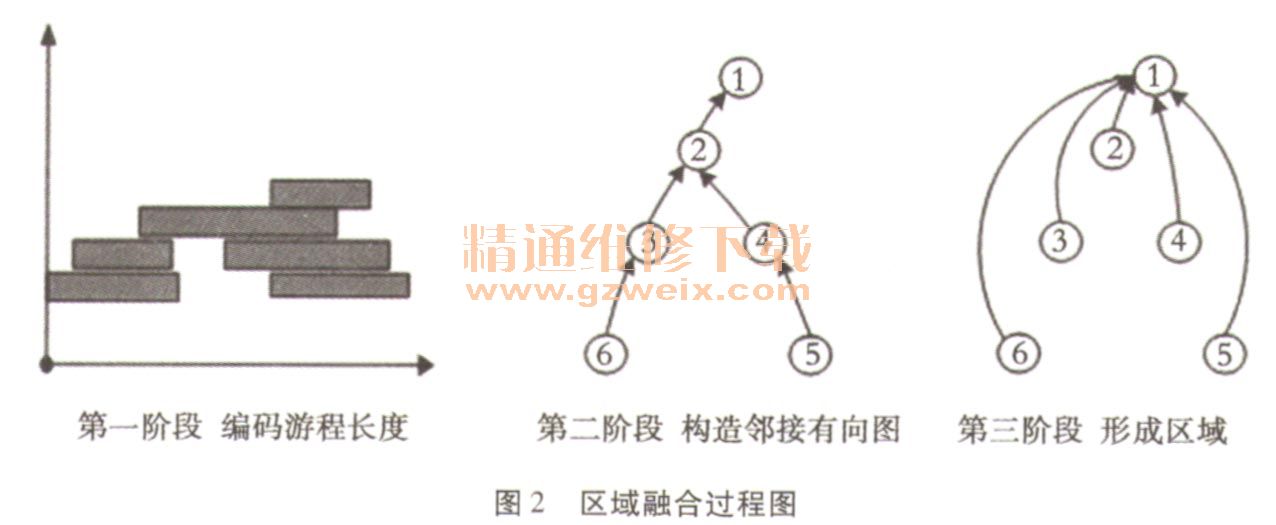
经过区域融合的三个阶段,计算得出了目标图像的中心即引导线的中心坐标信息,引导线的中心坐标计算公式如公式1和公式2所示:

公式I和公式2中的I表示每个游程长度,n表示区域融合后游程的数量,公式1中的a表示游程的起始的像素坐标值,公式2中的h表示游程的起始的像素纵坐标。
3 舵机转向控制
针对舵机转向的控制,采用公式3作为舵机转向的控制依据:
△x=x-xm (3)
上式中x表示引导线中心的横坐标,x。表示采集到的图像的中心横坐标,Ax表示引导线中心横坐标与图像中心横坐标的偏差值,当Ax大于零时,控制舵机右转向行驶,当△x小于零时,控制舵机左转向行驶,当△x等于零时,舵机方向不变化。
然而,舵机的转向角度是通过Kinetis60单片机控制模块,调节脉冲宽度来实现的,舵机转向脉冲宽度调节值公式如公式4所示:

上式中Pm表示引导线位于智能小车中心位置时的脉冲宽度调节值,Pr-表示舵机处于右转最大位置时的脉冲宽度调节值,p1表示舵机处于左转最大位置时的脉冲宽度调节值,Ymax为目标图像的最大纵坐标值,Ymin为目标图像的最小纵坐标值,Ax为引导线中心横坐标与图像中心横坐标的偏差值。





