・上一文章:宝马740Li 发动机故障灯报警
・下一文章:宝马750Li DSC防滑灯常亮
一辆行驶里程约26000km的宝马Z4轿车。车主反映:该车在行驶中DSC故障灯点亮报警,并且车辆行驶中有点跑偏。
接车后:首先连接ISID进行诊断测试,读取故障内容为5EC1-DSC转向允传感器可信度。执行检测计划,然后更换了转向允传感器(SZL),对全车进行编程设码,再对SZL中转向允传感器的匹配。最后进行路试,故障灯再次点亮报警,读取的故障内容与原来一样。为什么DSC的故障灯报警,读取的故障内容却是转向允信号可信度,又怎么会引起车辆行驶中跑偏呢?这得从转向柱开关中心SZL功能作用讲起。
转向允传感器位于转向柱开关中心SZL内,SZL只能整体更换。SZL电子装置包括一个处理器、一个供电模块和下列接口:F-CAN、光学开关、电气开关。转向允传感器的设计结构为一种非接触式光学允度测量系统。该系统由一个代码盘和一个光学传感器组成,代码盘通过‘个传动机构直接与转向盘连接在一起,转动转向盘时,光学传感器内的代码盘随之转动。转向允信息从转向柱开关中心SZL传输到主动转向系统控制模块。用于测量转向允的光学传感器集成在 控制模块的印刷电路板上。DSC控制模块通过F-CAN与SZI连接在一起。DSC控制模块作为SZL的网关与相关控制模块连接。所有诊断功能都通过DSC控制模块执行。在SZL内没有故障码存储器。SZL无法直接与BMW诊断系统通信。用于诊断的信息也通过F-CAN传输给DSC. DSC提供与宝马诊断系统连接的通信接口。更换SZL时必须对DSC进行设码,设码从DSC处传输至SZL. SZL必须得到转向允和转向速度信息,以便作为DSC内各种功能的计算基础。还会计算其他信息,例如绝对转向允或转向盘圈数信息。可探测的转向允为180° /+180°。通过一个发光二极管和一个光缆单元从上方为代码盘照明。受代码盘上图案所限,从上方射入的光线只能到达底部的特定范围内。光束在那里到达行扫描摄像机上。行扫描摄像机将光信号转换为电信号并将其发送给SZL。相对转向允指的是转向盘允度位置,即使停止为控制模块供电时,仍会保留相对转向允的信息。
只有更换了SZL时才需要重新调整零位,更换DSC或维修转向系统/转向柱时也要重新调整零位。绝对转向允根据相对转向允和转向盘圈数信息计算而来。进行SZL零位调整时确定绝对和相对转向允, SZL识别出超出最大转向允的每个转向盘位置,每次调整零位前必须将车轮和转向盘调整到直线行驶位置。转向盘圈数信息表示转向盘转动了几圈。转向盘圈数信息通过一个虚拟计算模型自动确定。如果该信息丢失,例如停止为SZL供电时,必须重新获取该信息。此时SZL利用前车轮转速传感器的数据进行计算。两车轮转速相同时,SZL判定车辆处于直线行驶状态,因此识别出零位。所需最低速度为20k-/h。该过程无需通过BMW诊断系统进行初始化。一旦车辆超过最低速度,SZL就会自动获取转向盘圈数信息。路面情况不利时(路面结冰),可能会给计算转向盘圈数信息带来困难。在这种情况下DS(绘发出一条CC信息。所获取并经过计算的SZL数据主要通过F-CAN传输给相关控制模块。
Z4转向系统采用的是电动助力转向系统EPS,是指电子助力转向系统Electric Power Steering。转向允信号仅用于结合电机位置传感器信号进行校准,以便确定回位目标值(转向允为零)。之后,“转向盘主动回位”功能利用电机位置传感器的信号,因为该信号的分辨率高于转向允传感器信号,因此可实现精确控制。如果因SZL出现故障等情况而无法提供转向允传感器信号,则“转向盘主动回位”功能无法运行。其他EPS功能仍保持启用状态。客户可能会用“跑偏”来形容此时的车辆状态,因为转向盘无法像正常状态下那样自动返回到直线行驶位置上。如果有客户投诉“车辆跑偏”,应考虑到的故障原因不仅包括底盘出现机械故障,而且还包括EPS与转向柱开关中心或转向允传感器之间出现信号或通信故障。在这种情况下,EPS无法提供“转向盘主动回位”功能,客户可能会用“跑偏”来形容具体情况。因此,进行四轮定位前应检查EPS的故障码存储器,必要时还要运行存储器内的检查计划,以便确定是否能够提供转向允传感器信号。
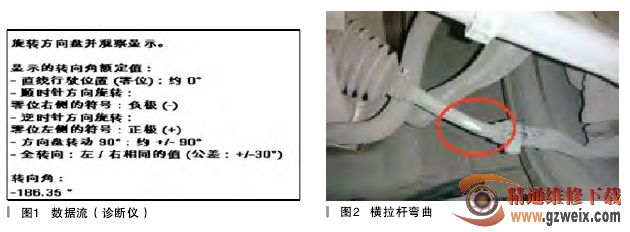
再次选择故障内容执行检测计划,ISTA系统首先从DSC中读取转向允信号,启动发动机转动转向盘检测比较转向允的标准值和实际值。实际测量结果如图1所示,与标准值不一致。接着建议检查下列可能的故障原因:转向允被错误匹配,车桥形状严重失调。转向允已经匹配过多次,接着举升起车辆检查车辆底盘是否有撞击变形的位置。结果发现右前方向横拉杆明显的弯曲了(如图2所示),更换右前方向横拉杆,然后进行四轮定位的调整,试车,DSC没有再次报警,故障排除。.





