・上一文章:丰田卡罗拉电动转向P/S灯长亮故障排除
・下一文章:江淮空调客车间歇性不能加速故障检修
本文重点讲解了倒车雷达的工作原理,结合实际阐述了倒车雷达的检测过程及故障诊断,并指出了使用过程中的注意事项。
一、超声波测距原理
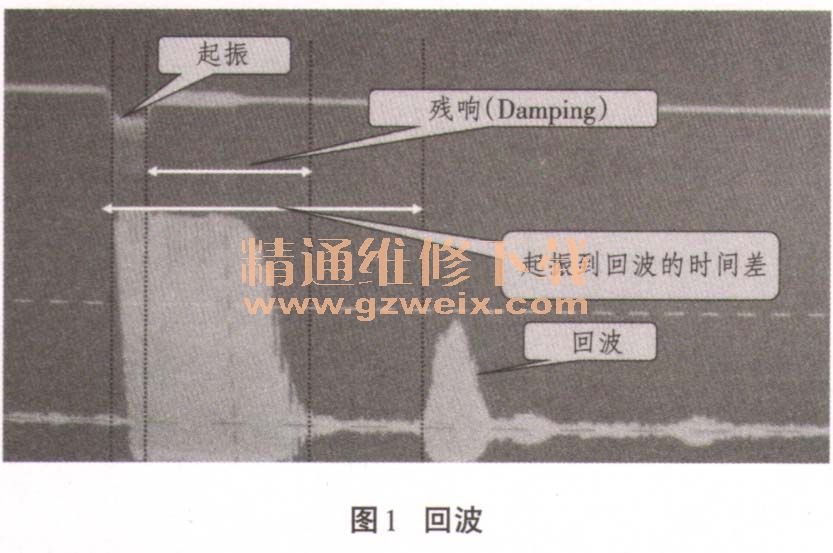
声波的产生是物体表面振动,从而使与此物体接触的空气产生波动,此波动将传播到远方,且会随传播的距离愈远,而使波动愈小,若没有遇到其它物体将消失于空气中,若遇到物体就会产生回波(见图1)。
声波的音速在一定温度下为定值,若声波波长为λ,频率为F,则C=λ*F,所以频率愈高,波长愈短,量测的距离误差愈小;因超声波频率比声波高,所以距离误差小。
超声波为20 kHz以上的声波,而0~20kHz为声波,空气中一般使用20~100kHz,水中使用1MHz以上,超声波在空气中行进,会因频率愈高而衰减愈快,使测距范围变短,所以采用40kHz的频率。
超声波一般用时间差法来测距,也可称为反射法,即超声波从发射到接收需经过物体来反射,所以耗费两倍的时间,若距离为D,时间T,音速C,公式为D=(C*T)/2。
音速会受温度影响而改变,若温度为X℃则音速C=331.37+X*0.6(m/s),一般超声波系统工作温度范围为-20℃~70℃,可计算音速的准确度为345 m/S110%。
音速的准确度将影响距离的准确度,所以距离的准确度也只有10%,若量测距离从35cm~100cm,则误差约有5cm。
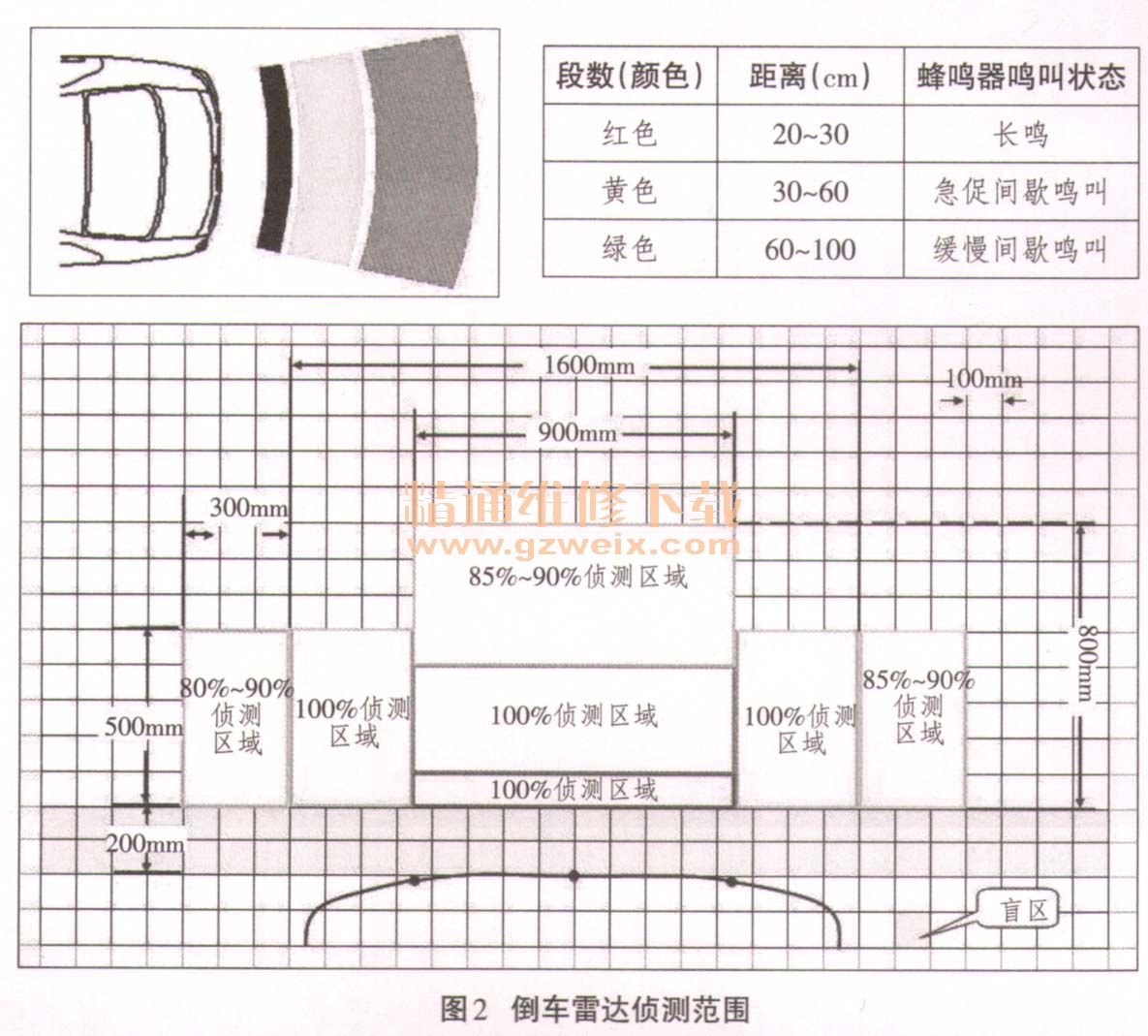
二、倒车雷达有效侦测范围
1.左右有效范围
各传感器水平呈现120°发射,有效范围覆盖车后左右两侧30cm以内。
2.上下有效范围
离地25cm以上、呈现45°发射,有效范围覆盖车后100cm以内。
倒车雷达侦测范围之具体描述见图2。
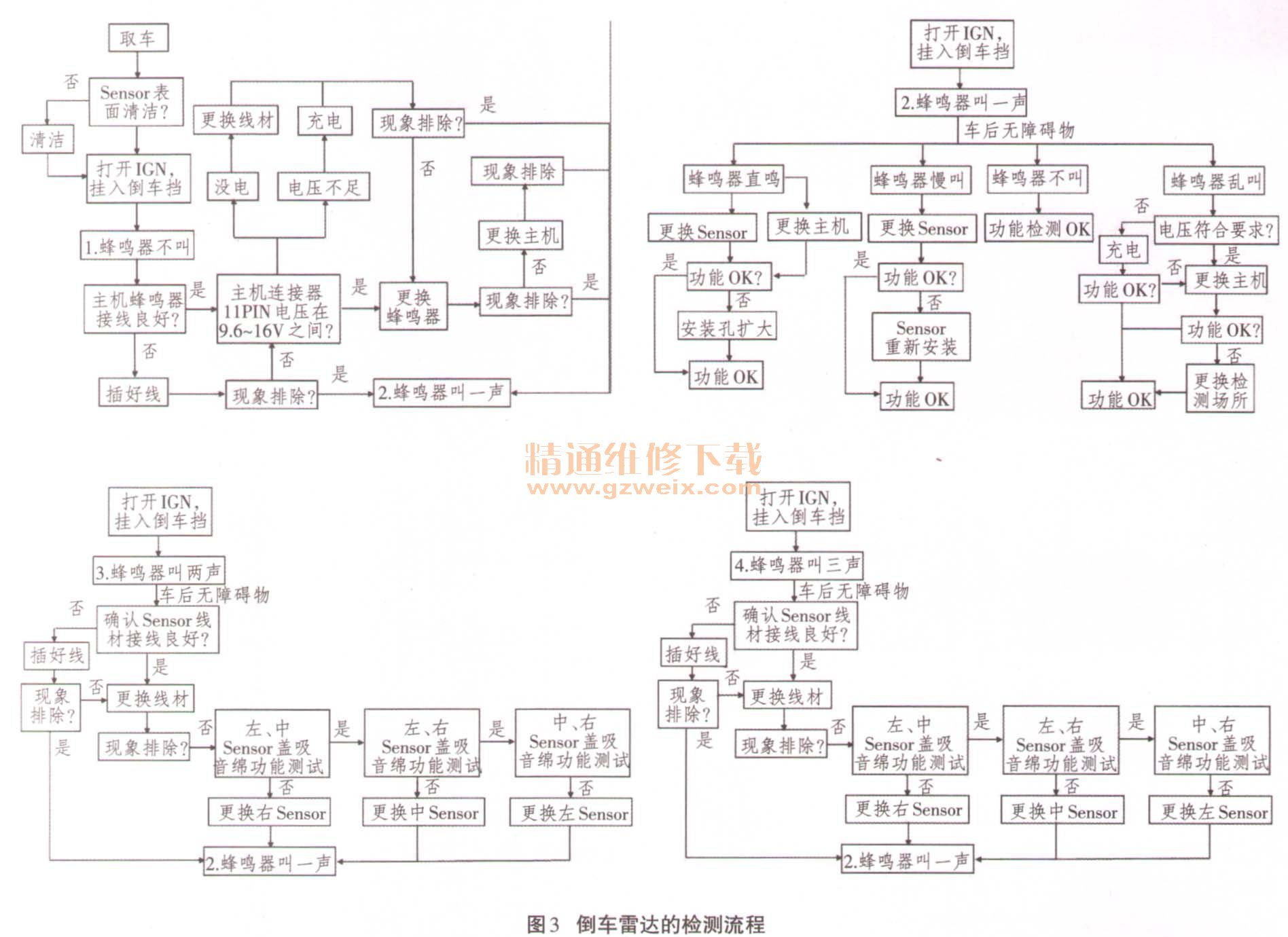
三、倒车雷达检测流程
倒车雷达的检测流程如图3所示。


")


