・上一文章:应用在汽车上的多功能VFD数字显示仪表
・下一文章:制作汽车车门自动上锁控制装置
1.4 AFS方案设计
1.4.1 系统设计要求
为满足相关法规的要求, 本文中的AFS设计定义了系统控制逻辑要求及规划、 参数及机能, 图6为AFS原理图。 系统设计基本要求如下。

1) 系统应能通过独立的AFS控制器进行控制。图5 不同速度与转弯半径下对应的车灯转角
2) 系统应采用旋转执行器加步进电机的方案来实现前照灯的驱动。
3) 系统应能够通过CAN/LIN总线与整车其他系统进行通信以及实现内部信号的传输。
4) AFS控制器不仅要做模糊的判断, 还要随着环境的改变不断地修正系统参数。
5) 在颠簸路面和短时间的路面冲击下 , 保证车灯照射角度和距离不会进行频繁地调整, 以提高系统可靠性,防止驾驶员眼睛疲劳。
6) AFS在电气控制系统出现故障时, 左右旋转方向应能够通过内部的机械结构实现灯光照射角度的自动回正。
1.4.2 控制系统设计方案
AFS控制系统设计方案采用了由主控制器和电机驱动控制器组成的分布式控制方式, 建立了电机驱动控制和AFS控制信号处理分离的架构, 图7为控制系统设计框图。
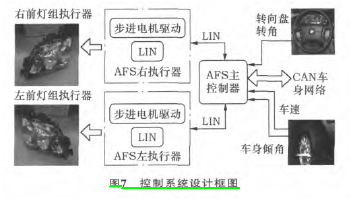
在图7中 , AFS主控制器主要以LIN、 CAN总线接口实现指令的输出和数据的交换,以及系统信息的采集、 模型数据计算车灯偏角等。 另外, AFS主控制器作为系统的中央控制模块, 还负责整个系统的故障诊断和检测处理, 能够根据不同的失效形式采取不同的解决措施, 并通过CAN总线实现故障的诊断传输。 驱动控制器主要负责通过LIN总线从主控制器接收电机的目标位置, 实现电机驱动和位置控制、 检测。 另外, 驱动器具备电机故障诊断功能,并将故障信息通过LIN发送到主控制器。
2 AFS软硬件设计
系统硬件指的是传感器、 执行机构、 控制器和总线通信线束等, 软件指的是控制器中的程序。AFS以实现不同的功能为目的, 选择性配装, 所以其软硬件变化比较大。
2.1 AFS主控制器设计
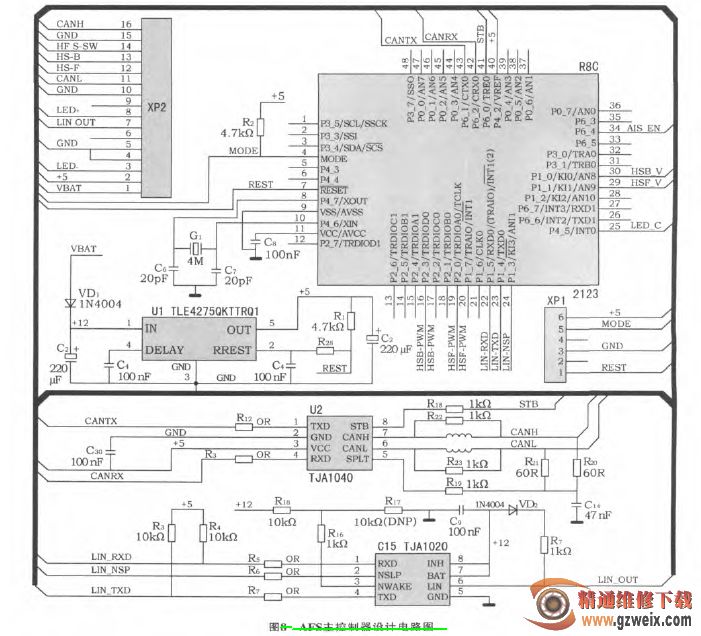
AFS主控制器对采集到的车身CAN信号和轴高信号, 经过控制器内置的位处理器进行计算, 然后将计算的车灯偏角信号通过LIN总线发送给驱动控制板。 图8为AFS主控制器设计电路图 。 图9为AFS主控制器输入/输出框图 。 另外 , 主控制器可对CAN/LIN总线通信、 轴高传感器、 驱动控制器、 执行电机和Ballast等实施故障诊断, 并将诊断信息以DTC形式保存于EEPROM中, 也可通过CAN总线诊断服务进行读取/清除。 必要时, 故障码也可通过总线发送至仪表显示。
")
")
")
")

