・上一文章:应用在汽车上的多功能VFD数字显示仪表
・下一文章:制作汽车车门自动上锁控制装置
3 CAN/LIN总线设计分析
本文选择使用
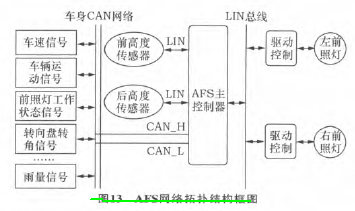
LIN总线来实现车灯控制系统单元中主、 从控制器间的数据传输。 LIN总线的使用实现了车灯传感器和控制器之间的通信, 其优点是硬件设计电路简单、 控制层次分明、 节点成本低。而CAN总线则用于车灯控制模块与车身上其他ECU之间的数据通信, 使得AFS可从CAN总线上采集车身信号, 实现了系统更加方便地进行故障诊断, 同时节省了材料成本, 也使占用的车内空间更小。 图13为AFS网络拓扑结构图。
AFS控制系统要求当驾驶者按下操作按钮时 ,车灯应能及时地做出相应的响应;同时,当车灯发生故障时,驾驶者应能及时得到相应的故障信息。系统响应时间不应超过250 ms。
4 系统试验
4.1 AFS模拟试验
通过建立AFS模拟台架, 在试验室模拟AFS真实的工作环境,同时用于验证AFS开发的正确性 、硬件结构的可行性和可靠性。图14为AFS模拟台架结构框图。
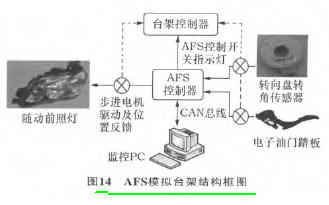
其中, 电子油门踏板用于模拟车速信号 , 台架控制器用于控制台架的电源供应和操作, 包括制造相应的故障, 以对AFS控制系统的故障处理功能进行检测。 图15为AFS模拟演示界面。
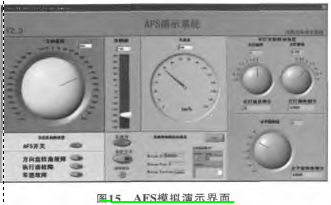
在演示程序下, 可以模拟各种AFS需要的传感
器输入
,
同时可以监控执行电机工作的状态以及返回当前位置等。 同时可以制造不同的故障 (如执行器故障等),来验证AFS控制系统故障处理策略。 其中界面中的总线开关断开时,该系统的模拟功能将会丧失。
4.2 系统应用
通过加装车身高度传感器以及AFS主、 从控制器和带有执行机构的可接收/反馈AFS控制信号的前照灯,在哈弗K5车 (带有CAN总线和SAS/转角传感器) 上进行了系统应用试验。 图16为AFS系统功能验证图。

试验过程中,将AFS 功能开关转到ON 档 , 打 开 近光灯, 可以观察到近光灯先回到内支点和下支点进行自检。 车辆起动前进时,当 速 度 超 过5 km/h 时 , 灯光会根据当前车辆状况自动调平。车辆弯道行驶时,主从灯可进行一定角度的转动。另外,车辆加减速时,光束会自动上下调节以保持调平状况。经多次验证,该系统能够增加行车弯道的照射面积达20°左右, 按照40 km/h的车速测算, 能够为驾驶者将反应余量增加约3 s以上, 而且随着车速的变化,车灯弯道转向速度也会相应变化; 另外, 通过控制系统软件设计, 该系统可以设置水平调节的最小行车速度及水平调节动作开始时的车身最小俯仰角度变化量, 以避免车灯水平照射角度的频繁调整。
5 结论
本文就汽车AFS的技术要求、 方案设计、 电机驱动技术、 控制策略、 总线技术等方面进行了一定的研究,实现了前照灯的智能调节功能, 但还不是完全意义上的自适应前照灯系统, 其中基于道路识别技术的光型实时变换的实现就更具挑战性。 另外, 执行机构驱动技术的完善使AFS实现更精确的自适应控制也是研究方向之一。 为提高行车的安全性, 最大程度扩大行车视野, 功能更全、 更完善的AFS研究将是必然的发展方向。
随着中国汽车工业的快速发展, 尽管AFS技术国内在研究和应用技术上有很大的局限性, 但其应用趋势明显上升, 国内很多汽车厂家、 汽车电子零部件公司和灯具厂等都已经开始了该技术的研究。随着国家标准的制定以及灯光控制技术的日益成熟, 越来越多的国产乘用车将会配置该系统。 本文开发的AFS实现了前照灯自适应调节的功能, 并且已经在部分车型上得到了使用验证。
")
")
")
")

