・上一文章:应用在汽车上的多功能VFD数字显示仪表
・下一文章:制作汽车车门自动上锁控制装置

图8电路中, 系统主芯片采用日本瑞萨公司生产的R8C 2123芯片, 该芯片最高工作频率是20 MHz并支持2.2~5.5 V电压, 1 M字节的地址空间。 它支持小到中规模的系统, 在内置电机控制用定时器的产品中, 支持诸如 “系统控制+电机控制” 这样先进的系统。 标准内置外围设备包括8位多功能定时器、 16位定时器、 UART/时钟同步串行接口, 电压检测电路、 上电复位电路、 高/低速内部振荡器、 看门狗定时器等。
2.2 AFS从控制器设计
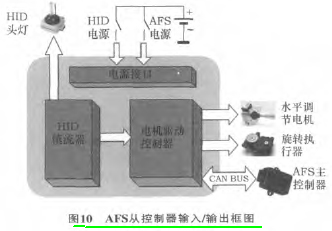
AFS从控制器 (电机驱动控制器) 通过LIN总线 接 收 主 控 制 器 信 号,控 制 电 机 的 旋 转 角 度 、速度、 加速度, 包括当前位置反馈和故障监测,从而实现近光灯灯轴的上下左右调节。 同时, 并将电机当前的状态反馈给主控制器。 图10为AFS从控制器输入/输出框图。
AFS从控制器驱动模块设计还需考虑包括在线诊断和标定、 异常处理 (总线异常、 传感器异常、超温、 开路、 反极性等) 等方面的内容; 另外, 电机运动控制优化(避免失步、减少噪声、相位和速度控制、电流控制等)、减少维持电流和减少发热等也是需要注意的方面。图11为步进电机驱动控制电路图。
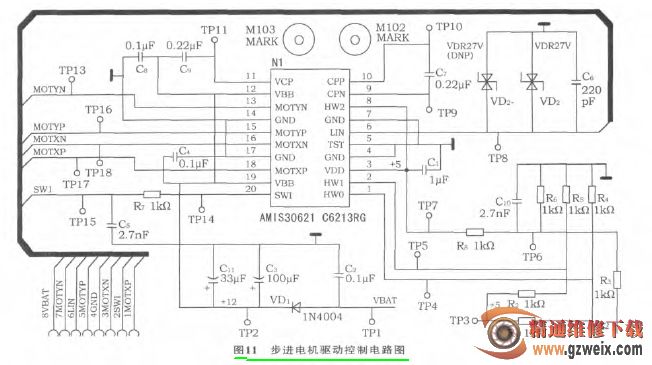
图11电路中采用了电机控制芯片AMIS-30621,其内置了电源模块、控制器、 LIN总线收发器、电机驱动等功能。其主要特性有:最高峰值电流输出达800 mA; 提供了最高达16细分数的步进电机驱动;内建加减速算法,完全兼容LIN总线规范。
2.3 执行机构设计
AFS执行机构采用了旋转执行器加步进电机方案, 在减速机构中加入了位置反馈器, 可以对转角进行实时监测和修正, 有效地避免了步进电机的失步。 采用旋转执行器可以通过高精度的齿轮减速系统来驱动灯头旋转, 从而实现精确调节光束。
执行机构应具备驱动接口, 用于接收驱动控制器的相位驱动电流, 从而驱动电机旋转。 弯道调节旋转执行器设计时, 要考虑到输出力小、 响应速度快、 寿命长、 噪声低的要求。 水平调节驱动电机应由专用驱动芯片控制, 并且有传动杆进给量的反馈信号输出, 电机总成设计时, 必须要从系统控制的角度加以考虑。 表2为执行电机设计参数。

2.4 AFS控制系统软件设计
系统数学模型是基于C语言软件来实现的, 控制策略算法集成在AFS主控制器的单片机中, 图12为软件控制流程图。
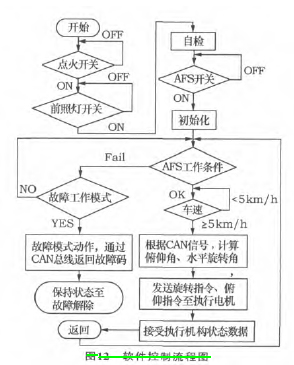
图12中, 利用程序可实现包括通过CAN总线采集车身信号、 车身高度传感器模拟信号转化、 AFS功能信号控制、 系统自检、 通过LIN总线进行电机驱动信号通信、 前照灯启动控制、 故障检测和失效模式处理等方面的功能。 另外, 系统软件集成了弯道转向和水平调节控制算法功能, 通过计算系统可补偿由于弯道照明、 车身俯仰而造成的光照距离变化, 补偿效果符合相关法规的规定。
")
")
")
")

