・上一文章:检修明基FP71G+型液晶显示器雷击后,不能开机,电源指示灯也不亮
・下一文章:分析及检修02E DSG自动变速器换挡冲击故障
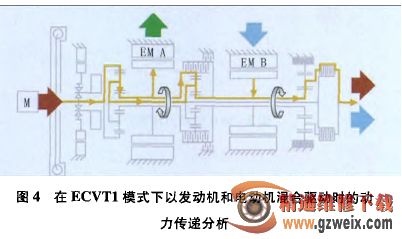
如图4所示,采用发动机和电动机B混合驱动方式时,发动机功率分为两个部分,也可以说发动机的功率“分支”,这就是“功率分支式混合动力”术语的来源。这两个部分包括:机械部分—直接用于驱动车辆;电气部分—电动机A作为发电机使用并产生电量。发电机产生的电能可以部分或完全存储在高电压蓄电池内,电动机B以电动机形式吸收电能,电能完全或部分来自电动机A或高电压蓄电池,各能量的大小取决于很多因素,这些能量由混合动力主控制单元(HCP)随时重新计算和调节。
两个ECVT模式的特点在于,除发动机机械驱动路径外还有电动驱动路径。使用电动驱动路径时,发动机借助一个发电机产生电能,这些电能完全或部分通过一个电动机用于驱动车辆。这种电动驱动路径的布置方式与串联混合动力驱动装置相同。
当电动机B输入一个转速,行星齿轮组2和行星齿轮组3的太阳轮被电动机B主动约束,此时发动机的输出动力可以被传递到车轮上,车辆开始行驶。随着电动机B的转速改变,变速器的减速比不断减小,这样便对发动机输出转速实现了连续变速(CVT),同时电动机B的动力与发动机的动力叠加后输出到车轮上。由于电动机的转矩在零转速下就可达到最大值,这可以给车辆起步提供充足的动力。
如果考虑到能量流的总量,则电动驱动装置可以为发动机提供支持,在这种模式下也可以为高电压蓄电池充电,但是发动机必须提供更大功率且消耗更多燃油,这种情况看起来是一个缺点。混合动力运行策略主要负贵实现这种所谓的“负荷点提高”,如果这样可以提高发动机效率的话,例如满负荷时效率高于部分负荷,通过这种方式存储的能量用于相对较小的额外能量损耗,例如可以以后重新用于以纯电动方式行驶。
4 ECVT2模式动力传递分析
与ECVT1模式相反.ECVT2模式设计用于较高车速。在ECVT2模式下既可以纯电动方式行驶,也可以起动发动机行驶,传动比可以在1.800-0.723调节。与ECVT 1模式下相同,电动机转速在此也用作控制参数。根据具体数值可以看出传动比较之ECVT 1模式更小。因此适于较高车速,但电动机的传动比也更小,就是说,它的有效转速范围向更高速度推移。如图5所示,电动机可以为发动机提供支持或用于为高电压蓄电池充电,与ECVT1模式相似,通常一个电动机作为电动机运行(在此为电动机A),另一个作为发电机运行(在此为电动机B)。在ECVT2模式下片式离合器2接合,所有其他片式离合器均断开。

在ECVT`2模式下也可以通过控制电量流(考虑到总量)使高电压蓄电池充电(发动机负荷点提高)或放电(为发动机提供支持),运行策略会在考虑最佳总效率的同时调节相应能量流。
")
")
")
")

