・上一文章:威力XQB30-1型全自动洗衣机洗涤电动机只能做一个方向运转
・下一文章:自动变速器故障导致飞度发动机自动熄火
八、多媒体可视防撞图声报警系统换道辅助电路的工作原理
多媒体可视防撞图声报警系统换道辅助电路的工作原理说明如下。
(一)换道辅助电路的雷达传感器
雷达传感器简称RADAR,是RAdio Detection And Ranging的缩写,意为电磁波探测与目标定位。由于雷达传感器与超声波传感器、红外线传感器相比受环境的影响较小,而且可以透射非金属材料,故非常适用于作为车辆防撞探测机动车的传感器。
1.雷达传感器的安装位置
雷达传感器与换道辅助系统控制单元微处理器集成在一起形成了模块封装方式。其中:右侧雷达传感器与主控制单元 J769集成在一起,用于对车辆右侧的区域进行探测;左侧雷达传感器与副控制单元J770集成在一起,用于对车辆左侧的区域进行探测,这就形成了两个组件,这两个组件安装在车辆保险杠处。为了防止雨水的浸蚀,采用了罩板遮盖式密封型安装方式。
2.雷达传感器的探测原理
雷达传感器是通过探测静止物体的距离和角度来识别其位置的。对于移动的物体来说,就可以探测到运动物体当前的位置、速度和移动方向。其工作原理是:
正常工作时,雷达传感器先向外发射高频电磁射线,也就是向外发射微波,该信号遇到物体后就会有信号反射回来,雷达传感器接收到反射回来的信号,经有关电路分析判断就可以得到物体与车辆之间的距离。
由于物体的反射特性各不相同,金属物体能够很好地反射微波射线,而塑料则几乎能够完全透射微波射线。因此,通过雷达传感器可以非常有效地探测机动车的位置。
3.雷达传感器的天线
雷达传感器的天线电路板也集成在换道辅助系统控制单元模块内,分为发射天线与接收天线两部分。通过连接插接件与其他电子控制电路进行连接。其中:发射天线由40个方形铜片(也称为贴片)基板构成,3个接收天线主要由8或16个方形铜片构成。
4.雷达传感器内部的数字信号处理电路
雷达传感器内部的数字信号处理电路主要用来解析接收天线接收到反射波的物理特性,据此计算出反射对象的大小、位置与速度。这些信号提供给换道辅助系统作为识别变换行车道时的报警控制信号。一旦识别到可能发生交通危险时,系统就会发出图像提示或声音报警。
5.雷达传感器探测的区域
雷达传感器探测的区域可以用图3-18来表示。在车辆的每一侧均有一个监控区域,每一个监控区域都由一个后部区域与一个侧面区域组成。
(1)后部探测区域
后部探测区域是从车辆后边缘开始向后延伸约50 m,相当于A线段与B线段之间的区域。
(2)侧面探测区域
侧面探测区域是从车辆后部边缘开始延伸到c字母处为止,也就是B线段与c线段之间的深色区域,该区域也就是两个约为3.6 m的区域。
图18所示是指车辆行驶在一条直线道路上的情况,当车辆在弯曲的道路上行驶时,由于换道辅助系统的使用条件是道路的曲率半径必须大于170 m。一旦道路的曲率半径小于170 m限值时,换道辅助系统就会自动关闭而停止工作,这主要是由于此时雷达发射的射线已经无法继续探测整个50m的后部监控区域。由于换道辅助系统的关闭限值具有30m的滞后特性,也就是说,当换道辅助系统由于道路的曲率半径过小关闭后,只有当道路的曲率半径增加到200 m以上时,系统才会重新启动工作。
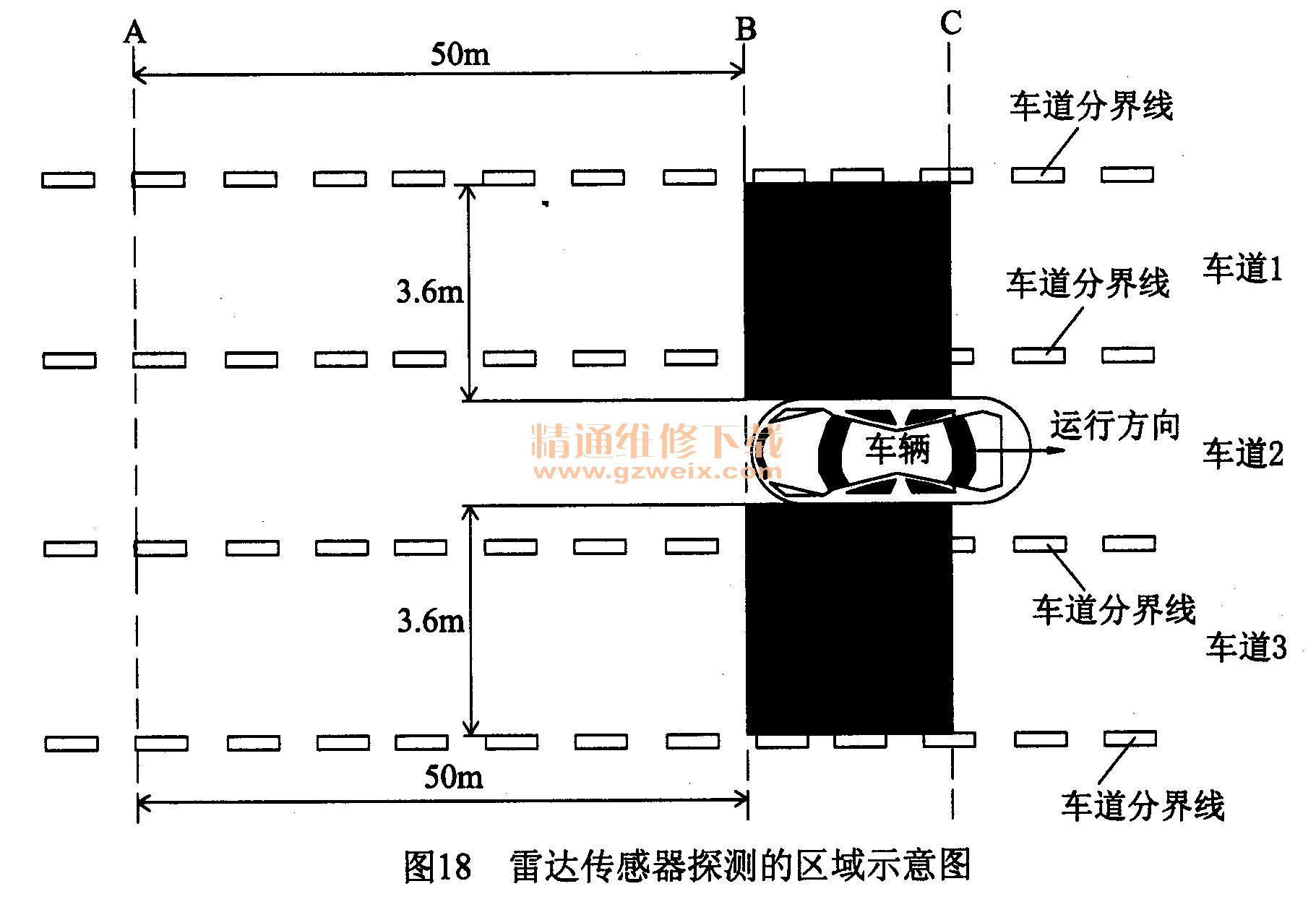
换道辅助系统控制单元是根据ABS控制单元J104提供的偏航角速率和各个车轮速度计算行驶道路的曲率。在转弯时,换道辅助系统控制单元利用其内部预先存储的软件将弯道监控区域模拟为直线行驶道路。由此就可以将车轮直线道路行驶和弯道行驶时的计算方法与判断基础保持一致。
(二)换道辅助电路的控制单元
换道辅助系统控制单元分为主控制单元J769与辅助控制单元J770。这两个微电脑控制单元在结构上完全相同。
1.换道辅助系统控制单元内部结构
换道辅助系统控制单元的内部主要由一块电子线路印制电路板与一个数字信号处理电路构成的中央微处理控制器,用来计算、处理雷达传感器探测到的物体有关信息,经处理后供车轮运行换道时使用。
2.换道辅助系统控制单元屏蔽罩
换道辅助系统控制单元有一个特制的塑料罩壳,该塑料罩壳是采用专用的塑料制成的,它可以使雷达的微波射线穿透而不会产生明显的衰减。故当该塑料罩壳损坏以后,不能采用普通的其他塑料罩壳代换。
3.换道辅助系统控制单元安装位置
两个换道辅助系统控制单元J769与J770均安装在后保险杠处的端板上。端板则被夹在保险杠罩板上后使用螺栓紧固在车身上,虽然在车辆外部看不到,但由于保险杠是采用塑料制成的,故不会影响集成在换道辅助系统控制单元内部雷达传感器的微波射线的传输。
由于换道辅助系统控制单元安装时与车身横轴呈22°,并向上倾斜约3°,这样十分有利于传感器对车辆侧面的空间环境进行探测。故在进行故障修理或更换换道辅助系统控制单元时,应采用专用的工具对安装角度进行仔细精确的调整。否则会影响换道辅助系统传感器的探测距离。
(三)换道辅助电路的供电
换道辅助系统的供电属于受控电源,该受控电源来自于整车15号线上的电压,该电压受点火开关的控制,当点火开关接通时,供电继电器J329输出的蓄电池电压就会经熔断丝架C上的熔断丝4(即SC4熔断丝)→T14d/1插接件后分为两路:一路经T 12I/9插接件提供给换道辅助系统主控制单元J769内的电路,作为其正常工作时的电源;另一路经T12 m/9插接件提供给换道辅助系统副控制单元J770内的电路,作为其正常工作时的电源。
(四)换道辅助电路的按钮开关与指示灯
换道辅助系统按钮开关E530的一端通过插接件T20a/1搭铁,也就是接地线,另一端通过T20a/8插接件→T14d/10插接件→T121/8插接件,与换道辅助系统主控制单元J769相连接,为驻车辅助控制单元J769提供用户使用或断开换道辅助系统的开关信息。
换道辅助系统控制按钮开关指示灯K232的一端通过插接件T20a/1搭铁,也就是接地线,另一端通过T20a/6插接件→T 14d/4插接件→T12I/3插接件,与换道辅助系统主控制单元J769相连接,受换道辅助系统主控制单元J769输出的驱动信号的控制,当K232点亮时,表示换道辅助系统已经启动工作,熄灭时说明换道辅助系统已经停止了工作或指示灯本身损坏。
(五)换道辅助电路的启动方式
换道辅助系统可以采用换道辅助系统按钮开关E530进行启动使其工作,但必须满足下述两个条件:
①车辆运行时的最低速度必须超过60 km/h;
②车辆运行时当前的道路曲率半径不得低于170 m.
上述这两个条件均满足时,换道辅助系统才会进入正常的工作状态,上述任一个条件不能满足,换道辅助系统就会自动切换到停止使用状态。
(六)换道辅助系统报警灯电路
换道辅助系统报警灯K233和H234安装在车辆两侧的后视镜内侧,用于对驾驶员的运行换道进行报警提示。其中:K233设置在驾驶员侧车外的后视镜内,K234设置在副驾驶员侧车外的后视镜内。
1.换道辅助系统报警灯的组成
换道辅助系统报警灯K233与K234均由4个黄色发光二极管串联而成。
(1)系统报警灯K233
驾驶员侧的换道辅助系统报警灯K233的一端通过T4d/2插接件→T20a/17插接件→B489搭铁点搭铁,也就是接地线;K233的另一端通过T2ag/ 1插接件→T4d/1-T20a/18插接件→T 14d/2插接件→T12 m/6插接件,受换道辅助系统副控制单元J770输出的驱动信号的控制。
(2)辅助系统报警灯K234
副驾驶员侧的换道辅助系统报警灯K234的一端通过T4e/2插接件→T20b/ 17插接件‘B489搭铁点搭铁,也就是接地线;K234的另一端通过T2a留1插接件→T4e/1-T20b/18插接件→T14d/13插接件→T12 m/8插接件,受换道辅助系统副控制单元J770输出的驱动信号的控制。
2.报警方式
当换道辅助系统探测到车辆左或右侧两边车道上的某一车道有危险,且在本车没有即将变换车道的迹象时,相应车外后视镜内的报警灯就会点亮,以告知驾驶员这一情况。如果驾驶员操作转向信号灯需要变换行车道路、但需要变换的道路上己经有其他车辆时,则相应车外后视镜内的报警灯就会连续闪烁4次,以警示驾驶员所换车道上有车辆在运行,防止撞车。
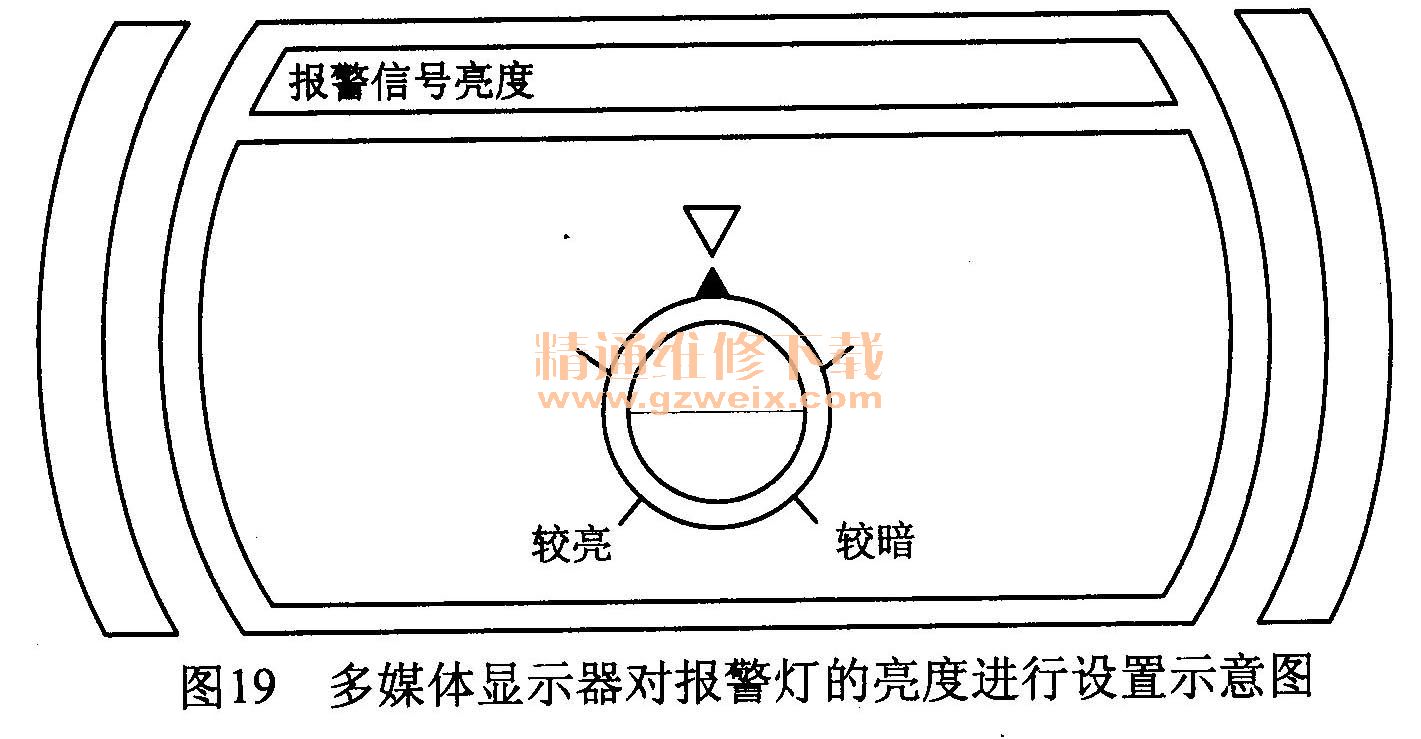
3.报警灯亮度的设定
换道辅助系统报警灯的亮度可以通过多媒体显示器来进行设置。共有5个不同的亮度调整等级可供选择,用户可以根据自己的实际需要进行调整。但换道辅助系统报警灯的亮度还受雨水与光线检测传感器G397检测到的环境光在一定范围内进行自动设定。
在采用多媒体显示器来对报警灯的亮度进行设置时,可在多媒体显示器的汽车菜单中选择菜单项“奥迪换道辅助系统”并按下旋转调节器启动选项来进行调整,如图19所示。
(七)换道辅助电路信息的存储方式
当换道辅助系统使用完或驾驶员对亮度等级设置车辆行驶结束后,这些信息均会自动存储在换道辅助系统主控制单元J769内的存储器中,并通过车辆的舒适/便捷系统把相关信息与此时所使用的车辆钥匙相对应,也就是使个性化设置启动。这样,在下一次使用这把钥匙启动车辆时,就会重新启动相应的设置,也就是系统会自动调用最近一次的有效设置进行工作。
(八)换道辅助系统的信息传输方式
换道辅助系统是通过舒适/便捷功能CAN总线与其他控制单元进行信息交换的。但有的微处理器控制单元是通过数据总线诊断接口J533(网关)提供给舒适/便捷功能的CAN总线的。
1.换道辅助系统连接方式
换道辅助系统的主控制单元J769与副控制单元J770是通过一个专用的高速CAN总线进行数据交换的。主控制单元J769是扩展CAN上的用户,这样就可以通过数据总线诊断接口J533与其他总线用户进行数据交换。主控制单元也负责读取换道辅助系统按钮E530的数据。副控制单元J770控制车外后视镜的2组报警灯K233与K234,如图20所示。道辅助系统
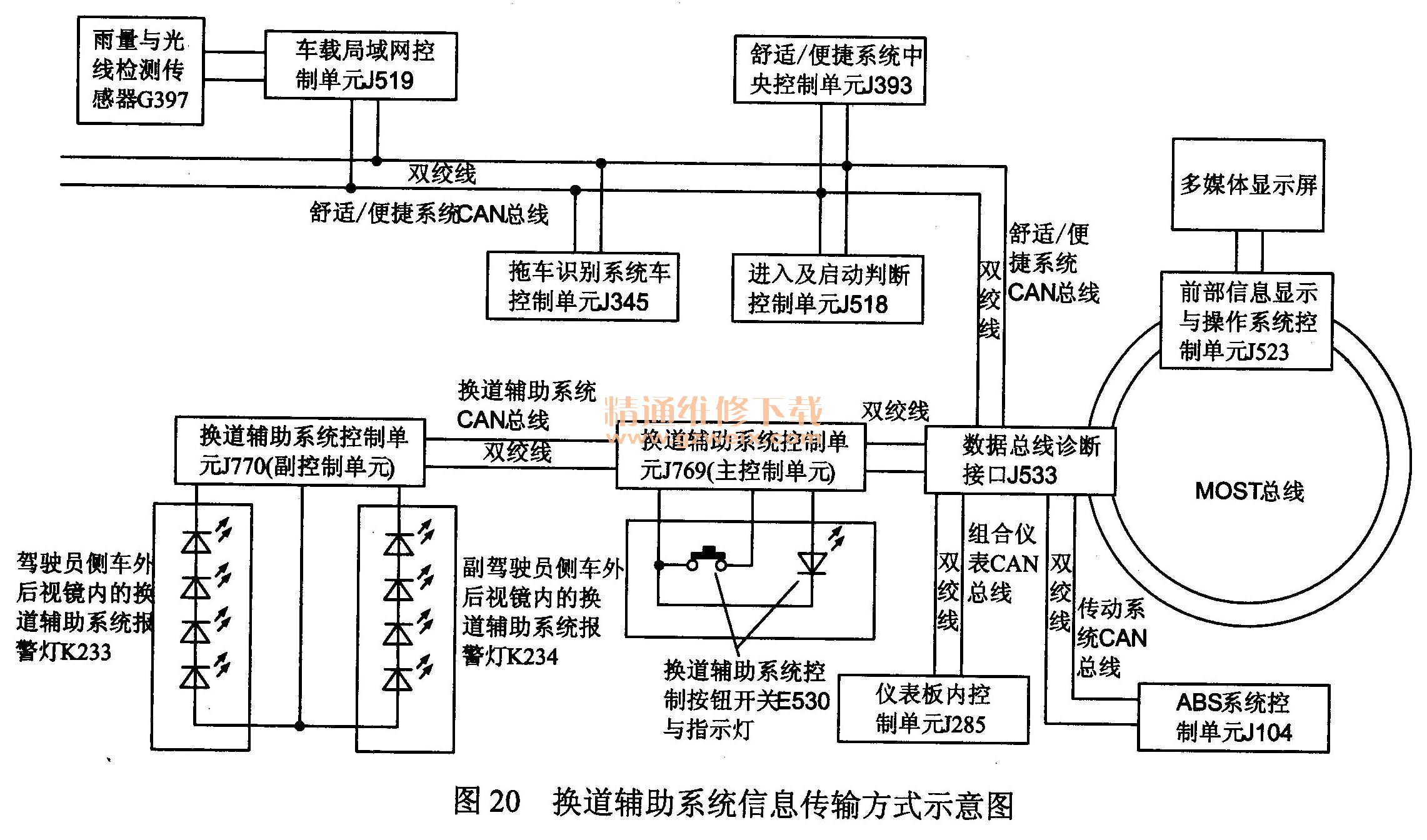
2. ABC控制单元J104
用于向换道辅助系统提供偏航角速率与当前的车轮速度,根据这些参数综合计算当前的车速与当前行驶道路的曲率半径。
3.拖车识别装置控制单元J345
用于对安装有倒车摄像机与雷达探测器系统的车辆进行检测,一旦检测到有拖车,就会输出相应的控制信号关闭换道辅助系统并在倒车或倒车驻车时关闭多媒体显示屏上的辅助线和辅助区域,并在组合仪表上显示带拖车的信息提示。
4.进入及启动许可控制单元J518
用于发送当前使用的汽车钥匙的钥匙密码。这样可以在接通点火开关后采用报警灯进行亮度报警。
5.舒适/便捷功能系统的中央控制单元J393
在车辆换道过程中,当车辆变换车道驾驶员将转向信号灯接通后,控制单元J393就会将左侧或右侧转向灯接通的信息通过总线系统提供给换道辅助系统。换道辅助系统据此判
断驾驶员是否进行变换行车道路的操作;同时,控制单元J393还提供给换道辅助系统此时倒车灯是否点亮的信息。倒车时,换道辅助系统将自动进入停止工作状态。
6.雨量与光线检测传感器G397
雨量与光线检测传感器G397的作用是对环境光线进行检测,并将检测到的光线转换为电信号后,通过LIN主控制单元为换道辅助系统与车载电网控制单元J519提供检测到的环境光的强度,用于根据环境光线自动对报警灯的亮度进行调节,使其亮度处于最佳状态。
7.仪表板控制单元J285
仪表板控制单元J285与多媒体显示屏配合,对车辆换道辅助系统进行监测,一旦发现换道辅助系统工作异常,就会以图像与声音的方式进行故障报警,告知驾驶员及时进行修理。
8.前部信息显示与操作控制单元J523
前部信息显示与操作控制单元J523用于对报警灯的亮度进行设置,设置后的信息与当前使用的钥匙相对应,然后通过总线系统存储在换道辅助系统的主控制单元J769中。
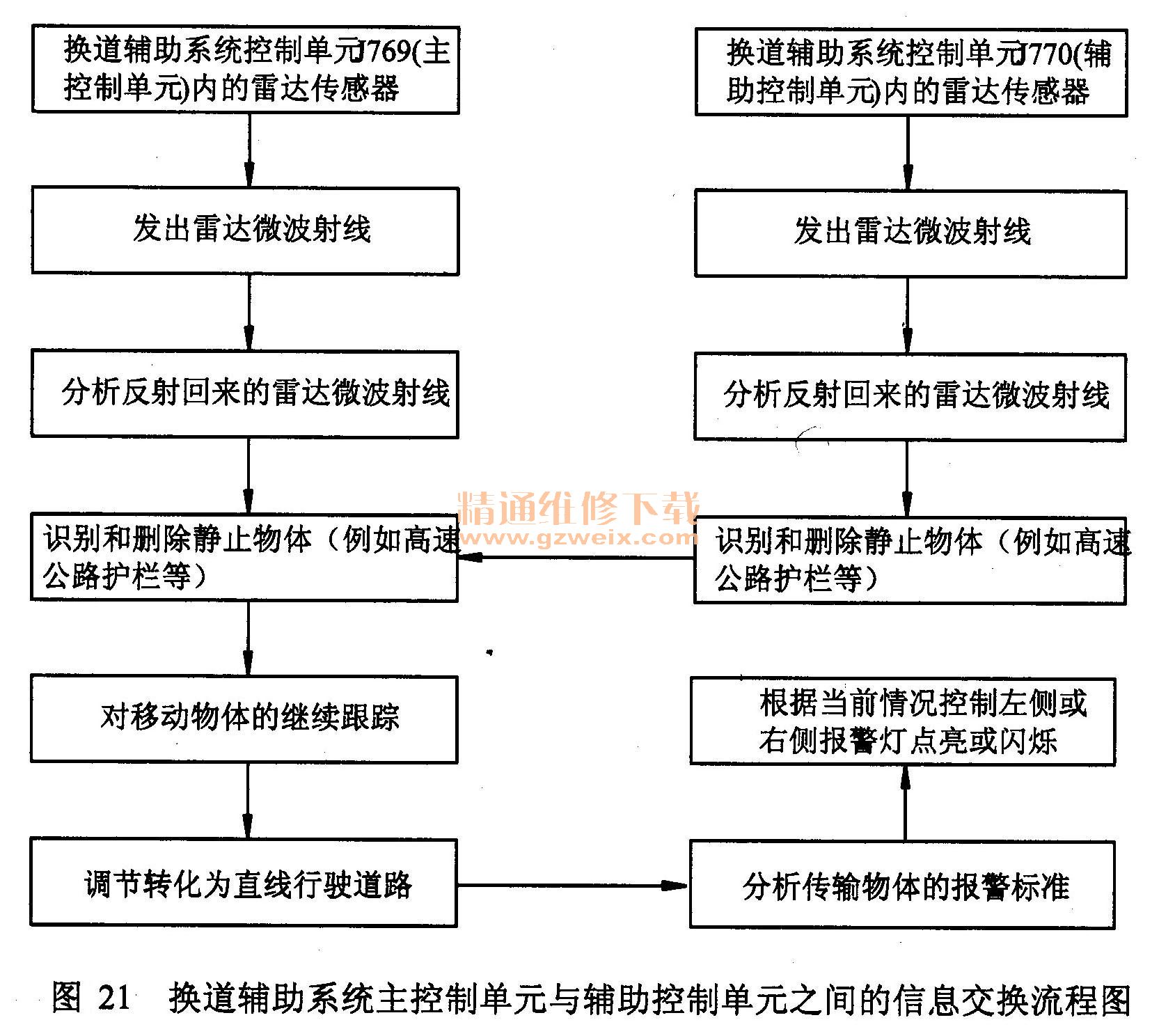
9.换道辅助系统主控制单元与副控制单元之间的信息交换
换道辅助系统主控制单元J769与辅助控制单元J770之间的信息交换方式可以用图21所示的流程图来表示。
(九)换道辅助电路故障的自诊断功能
1.换道辅助系统故障自诊断系统的地址码
换道辅助系统中的主控制单元J769具有故障自诊断功能,大众公司给该系统规定了一个地址代码3C,以供维修时在故障诊断仪(可以使用大众公司的VAS5052故障诊断仪)上输入该代码时调出换道辅助系统故障存储器中存储的故障代码。由于换道辅助系统的副控制单元J770没有地址代码,故无法采用故障诊断仪直接对其进行诊断,而由主控制单元J769通过总线来对其进行故障诊断。
2.换道辅助系统故障存储器存储的信息
换道辅助系统中的主控制单元J769内含故障存储器、数据流测量值数据块、密码和匹配通道等电路,尤其是主控制单元J769中内部故障存储器存储的故障代码与数据流,对故障检修十分有用。采用VAS5052故障诊断仪分别调出故障代码与数据流,尤其是数据流,将其与正常值数据流进行对比分析,就可以很方便、快速地确定出故障的大概部位。
3.换道辅助系统数据流包含的内容
换道辅助系统中主控制单元J769内故障存储器存储的数据流包含的内容主要有以下4个方面。
(1)当前换道辅助系统的状态
是接通状态还是关闭状态,主控制单元J769与副控制单元J770的工作电压情况与其内部的温度。
(2)发送的功能输入数值
主控制单元J769与副控制单元J770之间的专用CAN总线的通信状态;参与换道辅助系统工作的各个控制单元之间的通信状态及这些控制单元通过CAN总线发送的功能输入数值。
(3)校准信息
计算得到的当前道路曲率半径;车辆左侧、中间和右侧行车道上最近物体的x坐标与Y坐标;车辆左侧、中间和右侧行车道上最近物体的相对速度;自动校准的当前状态,也就是校准信息。
(4)指示灯的状态
换道辅助系统按钮开关E530的状态及其指示灯的状态;车辆外部两个后视镜内报警灯的状态。
4.换道辅助系统密码设置的内容
换道辅助系统中主控制单元J769内故障存储器存储的密码所设置的内容如下:
①安装换道辅助系统车辆的车型,车辆行驶的所在国;
②车辆属于左置方向盘还是右置方向盘,车辆内是否设置了拖车控制单元J345。
i.通过执行器诊断可以进行控制的元器件
换道辅助系统中主控制单元J769通过执行器诊断,可以进行控制的元器件主要是驾驶员侧与副驾驶员侧车外两个后视镜内换道辅助系统报警灯,以及换道辅助系统按钮开关E530内的发光二极管K232。
(十)换道辅助系统的工作过程
1.换道辅助系统的工作过程
在进行换道工作时,换道辅助系统中的2个控制单元组件中的雷达传感器发射天线向外发射的微波,就会被物体反射,由于不同的物体反射特性不一样,故微波射线就会被或多或少地反射回来。
反射回来的微波射线被换道辅助系统中的2个控制单元组件中的雷达传感器接收天线接收后,由数字电路对反射回来的微波射线的物理特性进行解析,就可以获得反射物体的各种信息。这些物理特性主要是雷达信号的发射与接收的时间延时、发射与接收信号之间的频率偏移及接收天线上的不同相位等。据此,就可以计算出各个物体当前的位置、速度及运动方向。
换道辅助系统主控制单元J769或副控制单元J770均可以单独探测静止的反射物体,例如道路设施、静止的车辆或公路护栏等,由于这些物体不会引起报警,故它们不会被控制单元继续跟踪。一旦雷达传感器探测到移动车辆或物体时,就会被主控制单元J769中的传感器继续进行跟踪。并且将非直线的行驶道路转换为直线行驶道路。由此就可以通过报警运算方法很方便地完成对当前情况的分析。
换道辅助系统主控制单元J769处理后的数据是通过专用CAN数据总线提供给换道辅助系统的副控制单元J770的。在J770电路中,也是按照报警运算方法进行处理,处理后的结果与预先设置的报警标准进行对照,一旦符合报警标准时,就会输出相应的控制信号驱动车辆相应一侧后视镜内的报警灯点亮。如果驾驶员仍然操作该侧的转向灯开关,则换道辅助系统报警灯就会从亮度较低的点亮状态转化为亮度较高的闪烁状态。
2.超车时换道辅助系统的工作过程
超车时换道辅助系统的工作过程可以用图22所示来说明。图中的车辆1为安装了换道辅助系统的汽车;车辆2为被超越的车辆。
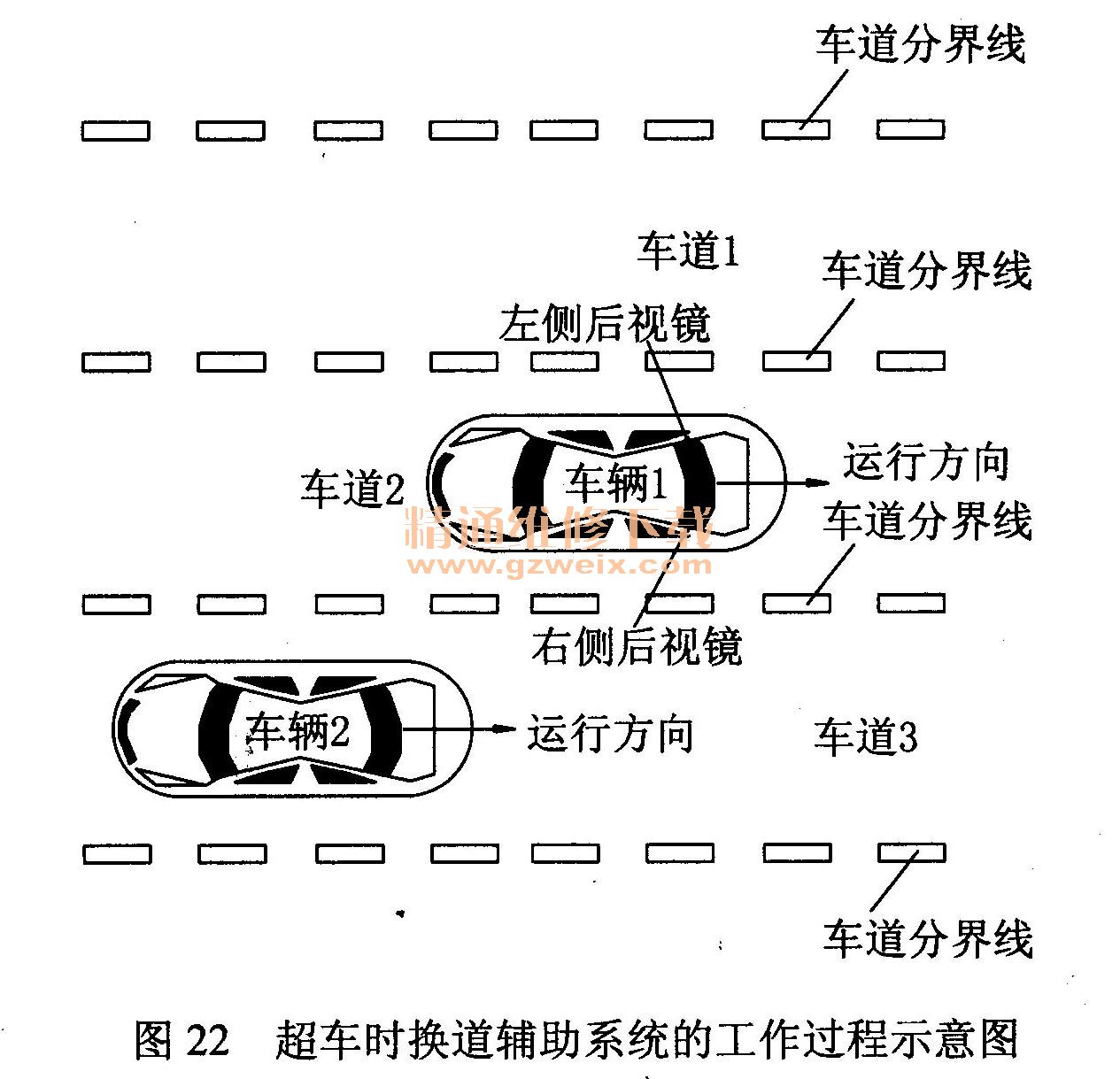
当安装有换道辅助系统的车辆1要超越车辆2时,假如车辆1与车辆2之间的速度差小于15km/h,由于速度差较小,超车时需要一定的时间,被超越的车辆2在一定的时间内有可能消失在“视野盲区”内。当出现这种情况时,车辆1右侧车外后视镜内的报警灯就会点亮,以告知驾驶员右侧行车道已经有车辆占用。此时,如果车辆1中的驾驶员又接通了右侧转向信号灯开关,则车辆1右侧车外后视镜内的报警灯就会变亮并进行4次的闪烁,以此来对驾驶员进行紧急报警,以防发生撞车事故。
3.被超车时换道辅助系统的工作过程
被超车时换道辅助系统的工作过程示意图可以用图23所示来说明。图中的车辆3为安装了换道辅助系统的汽车,车辆4为想超越的车辆。
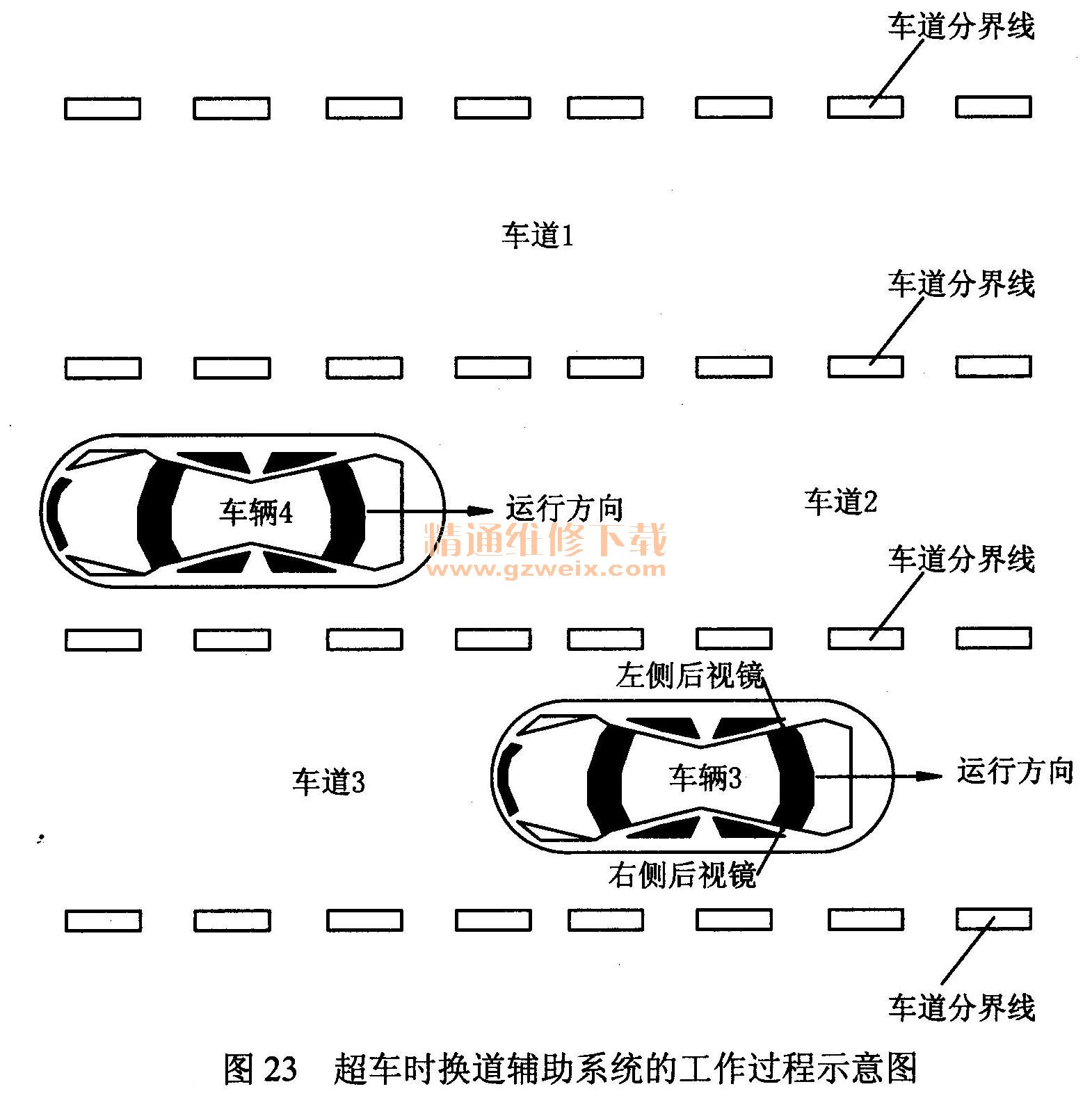
当车辆4要超越安装有换道辅助系统的车辆3时,假如车辆4以较高的车速从后面要超越车辆3,当车辆4越来越接近安装有换道辅助系统的车辆3时,安装有换道辅助系统的车辆3探测到车辆4后,其左侧外部后视镜内的换道辅助系统报警灯就会点亮,告知驾驶员有超越的车辆追上来。此时,如果安装有换道辅助系统的车辆3、的驾驶员又接通了左侧转向信号灯开关,则车辆3左侧车外后视镜内的报警灯就会变亮并进行4次的闪烁,以此来对驾驶员进行紧急报警,以此来告知驾驶员,如果变换行车道就有可能发生撞车事故。
4.超车或被超车报警灯启动工作时两车之间的最大距离
也就是在超车或被超车时,可能发生车辆碰撞风险报警时的最大距离,该距离主要由两车辆之间的速度差确定。速度差越大,该距离范围也就越大。但是,车辆外部后视镜内的换道辅助系统报警灯发出报警时的最大极限距离为50 m,这也就是雷达传感器的最大探测范围。
")
")
")
")

