・上一文章:宝凌BL-280型汽车音响收音声小且噪声大
・下一文章:奥迪A6L右侧两门玻璃无法升降且无法打开
摘要:从亲历的事故处理、故障维修及原因分析,介绍一汽大众CC车型自动巡航控制ACC的工作原理和基本架构、系统参数的选定、数据采集、处理系统的硬件设计和算法运用。
CC车型不愧是一汽大众的当家花旦,外观动感时尚,线条流畅,动力足够,虽底盘悬挂调校偏硬,但各项主被动安全配置丰富,适合中年人放心地安全驾驶操控。2012年5月我按揭购买了一辆CC2.0 T,其发动机最大功率和转矩分别是147 kW和280 Nm。无论在市内上班代步,还是举家外出旅游,上高速爬坡道皆得心应手,享受信马由僵的惬意。
人有旦夕祸福。2013年7月22日,在中山市我的爱车CC被追尾了,前面还撞上笨重的工程车!剧烈撞击挤压使车的前部后桥都已严重翘曲变形。事故处理完毕后,按交警必须就近维修的要求,车辆被拖到临近的火炬开发区专修三菱日系车的“汇伦”维修店。
经过一个多月焦心的等待,8月底维修店电话通知我:车已修好,过去验收。一试车,问题一大堆:车门密封不好,雨天漏水;外部温度计失效;座位自动复位失灵;最严重的是自动巡航控制ACC不能工作:有时系统提示“车距未经调整”,有时系统看不见前方的车辆,而临近车道上的车辆却有反应提示。车道维持/辅助功能也不能工作,图标在60 km/h时速不变绿,不能自动将车保持在现车道内,该功能已完全失效。
于是又开始耐心期待。10月初试车,ACC功能依旧和8月情况一样,无法使用。店主说ACC的控制器又换过一个新的了,已经尽到最大努力。制冷系统也完全失灵。正本清源,还得我援用自己的努力,帮着维修店认识大众ACC的基本原理和硬件软件,自己也详细研习不同波段电磁波天线发射接收的理论,来协助分析安排检查故障的因由和维修攻略。
通过共同努力,对电磁波发射接收原理了然于胸,到11月底ACC功能终于修复。我的CC车牌的后4位是5206,希望有关方面能看到本文,我对记述的事件负责。拖拉4个月的维修经历让我感慨颇多。建议国家应有规定,车辆的维修必须到车型相符的4S店,不能任由主办交警拖到其熟悉的店里去。
1 ACC的简介及其硬件
1.1自动巡航控制
Autonomous Cruise Control中译为自动巡航控制,简称ACC,本世纪初因微处理器而成熟的最具前瞻性的主动安全核心科技装置,标志计算机辅助驾驶突破性进展。它实现了汽车行驶过程的智能巡航控制,其防撞击雷达能自动测量自身车辆与前方车辆和障碍物之间的相对速度和相对距离,并根据计算出的安全距离,对危险和危急的程度作出减速或制动的判断,并即时警示和实施控制操作。
ACC系统具有定速、限速、加速、减速、恢复维持设定的原速等功能,既可以减轻驾驶疲劳,提高驾驶舒适性,而且由于微控制器直接连接着节气门的开度控制,影响发动机的工作状态,所以还减低油耗,提高运行效率,并减少有害气体排放。在高速公路上行驶时,ACC的定速巡航功能能使驾驶员不踏下加速踏板,车辆仍可按其所设定的车速保持定速行驶。ACC会根据驾驶员设定的目标车速和车辆行驶阻力的变化,自动调节节气门开度,车辆能以目标车速安全地自动行驶。当驾驶员换低速档或制动时,ACC会自动断开。
1.2自适应巡航控制
ACC自适应巡航功能不同于普通定速巡航,ACC自适应巡航系统利用低功率雷达波发射接收得到前车的确切位置,若发现前车减速或监测到突然前方变道切入的车辆新目标,有自我判断和自适应能力。如图1所示。市售配ACC自适应巡航功能一汽大众车型最低30万元起。

大众的ACC自适应巡航控制是一种主动巡航系统,Adaptive Cruise Control,简称ACC自适应巡航控制系统。是一种智能化的自动控制系统,它是在早已存在的巡航控制技术的基础上发展而来。大众将这一技术运用在中高端车型。有些地方把以智能化为核心的自动巡航控制系统和以定距离控制为主的自适应巡航控制系统区分开来,但两者英文缩写相同,都是ACC。后者相对前者较为更初级和基础。德系汽车 20世纪90年代末已有装载问世。
ACC系统包括雷达传感器、数字信号处理器和控制模块。驾驶者设定所希望的车速,系统利用低功率雷达或红外线光束得到前车的确切位置,如果发现前车减速或监测到新目标,系统就会发送执行信号给发动机或制动系统来降低车速,使车辆和前车保持一个安全的行驶距离。当前方道路没车时又会加速恢复到设定的车速,雷达系统会自动监测下一个目标。主动巡航控制系统代替驾驶者控制车速,避免了频繁的取消和设定巡航控制,使巡航系统适合于更多的路况,为驾驶者提供了一种更为轻松的驾驶方式。
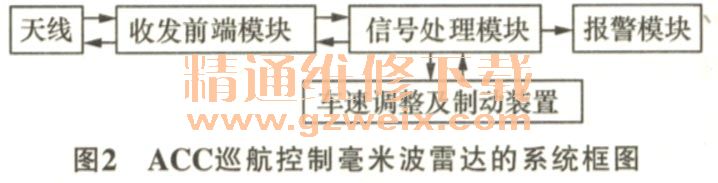
毫米波是指波长介于1~10mm电磁波,其射频电磁波的带宽大,分辨率高,天线部件尺寸小,能适应恶劣环境,所以毫米波雷达系统具有质量轻、体积小和全天候等特点,它以雷达测距、测速为基础。实时监测车辆的前方目标,是调频连续波雷达。ACC巡航控制毫米波雷达的系统框图如图2所示,包括天线、收发模块、信号处理模块和报警模块或汽车速度调整/制动装置。
1.3硬件
一汽大众汽车的ACC装置的硬件由控制器和天线2个部件组成,如图3所示。
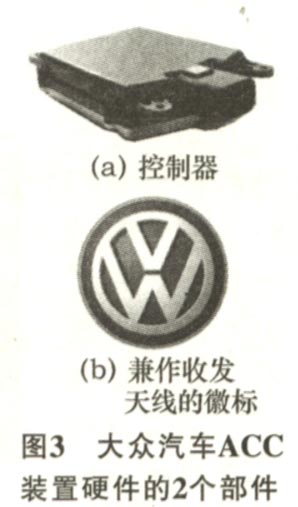
1)控制器,即含雷达发生器与信号处理等的雷达传感器部件,相当图2中的3个模块。其铭牌数据是:模式FMCW;工作频段24 GHz;发射功率3 W;工作距离150m。制造商:美国TRW公司。原装进口,标价1550美元。说明书指出有自动追踪、可逆约束停车、自适应制动等功能。亦可用于奥迪A6、Q7、A8。
2)大众汽车的标志,即徽标(LOGO)由V和W两字母上下叠合组成(图3b)。在有ACC功能的CC车型中是特制的,兼作雷达波的发射和接收天线之用,不能用一般车型的徽标替代。
大众汽车从车辆的外观即能判断出是否是一辆具有ACC的车型,该功能的雷达探测装置安装在前脸大众的车标内。在没有该功能的普通车型上,车的徽标仅“V”和“W”两字母笔画部分是金属镀铬的银白色框架,其字体以外的部分则镂空,可见到内有金属网罩通向车头内。一般直径为1315 cm、、而有ACC功能的车型,徽标因兼作雷达的发射接收天线,表面是微凸的整体金属镜面—类同家里房顶或阳台的接收C、 Ku等波段的碟形卫星天线。而不同微波波段的电磁波发射和接收的盘形天线直径各不相同,圆弧面曲率也各异。ACC的电磁波天线小到只有直径15 cm。
借来吉赫(GHz)频段的场强仪,在空旷的场地测试。当换上正确的天线,便有如图1这样以Logo为顶端向正前方发射圆锥面范围的雷达波波束。正常工作时,场强仪可测得与Logo等距离的圆截面上有相同的电场强度,也就有相同的场强值。我的大众CC最终就是换上了专用的整体金属镜面大众徽标,方能正常发送与接收雷达波,ACC功能遂得以恢复正常。
在福特旗下的“捷豹”(Jaguar)、丰田等一些车型,其测距测速雷达则设置在前方的保险杠中,它们是通过塑料车牌照后的天线发射微波探测信号。
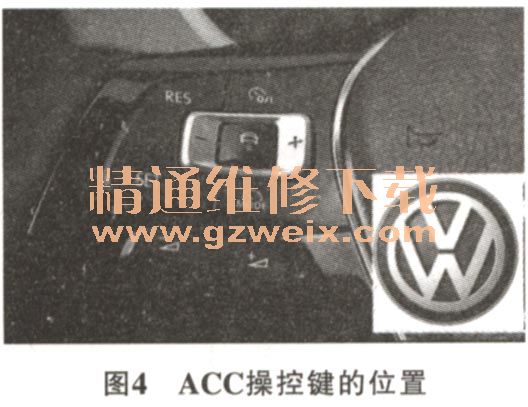
3)定速巡航用于控制汽车的定速行驶,汽车一旦被设定为巡航状态时,发动机的供油量便由控制单元控制,控制单元会根据道路状况和汽车的行驶阻力不断地调整供油量,使汽车始终保持在所设定的车速行驶,无需操纵油门,减轻了疲劳,同时减少了不必要的车速变化,可以节省燃料。一般情况下,当驾驶者踩下制动踏板或离合器时,定速巡航会被自动解除。当自适应巡航激活后,可以通过拨动控制杆上的“DISTANCE”按键来调整与前车的距离。一汽大众ACC操控键的位置见图4。在转向盘的左侧设置了ACC自适应巡航系统的按钮,这是这项配置首次出现在紧凑级家庭轿车上。
汽车电子技术智能化、网络化已使这些控制直接和发动机输出功率的控制紧密相连,对于汽油机:减少喷油量、推迟点火时间、节气门位置调整及采用辅助空气装置;对于柴油机:控制供油量和供油时间。
4)水的密度是空气的800倍。雷达波在雨雾中传输会受到影响吗?也就是说ACC的功能会因为雨天雾霆天而无法使用吗?电磁波传播研究是一门实验性科学,需要长期大量的实验数据积累和在应用实践中不断完善和发展,研究领域和课题也不断广泛和深入。传输或通信的品质与接收信号的强度有关,而接收信号的强度取决于发射机的功率、天线的增益和方向性,还取决于传播距离及电波传播过程中的介质状况等。雨、雾等恶劣气象环境对电波的衰减、去极化以及对10 GHz以上频段的通信系统(发射与接收)性能具有重要影响。正是因为具有微波波段全天候的特点,且体积小、质量轻、分辨率高、频带宽和大容量等特点,毫米波在军事方面具有广阔的应用前景。毫米波具有抗干扰、反隐身、反低空突防和对抗反辐射导弹的四抗能力。ACC也可算是一项“军转民”技术,将雷达应用在汽车电子控制技术上,无须顾虑气候环境的影响。
2ACC系统组成及控制原理
ACC是建立在以雷达测距、测速的基础之上的。系统实时检测车辆的前方,当前方有停止或慢行的车辆,比较自身的车速,相距小于安全距离而成为危险目标时,先是提前由声或光向驾驶者发出警示,同时雷达输出信号至汽车控制系统,根据信号和微控制器的运算,确定减速或自动实现安全平稳高效的制动。
毫米波雷达有调频连续波(FMCW)雷达和脉冲雷达两种。当目标距离甚近时,脉冲雷达发射脉冲和接收脉冲间的时间差非常小,对系统信号处理的高速性要求更高,增加近距离脉冲雷达的复杂性,成本也大幅上升,因而当前ACC的毫米波雷达常采用结构简单、成本较低、对近远目标探测皆有良好性能的调频连续波雷达体制。
图5展示了FMCW雷达ACC系统的构成,包括雷达波发生器、天线、发送接收模块、信号处理模块、警示模块、加减速制动控制装置等。
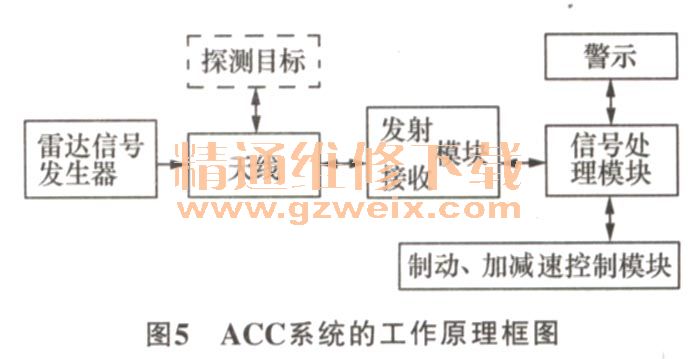
射频发射接收前端是雷达系统的核心,微波传输以波导效率最高。前端的架构采用波导结构,还包括环形器、定向祸合器、线性VC0、调制信号源、平衡混频器和低通滤波器等微波器件。前端混频输出的中频信号送至后级数据信号处理。数据处理的目标消除非必要信号(如杂波)和干扰信号,并对经中频放大的混频信号进行处理,从信号频谱中提取目标距离与速度等信息。
2.1 ACC系统雷达测距与测速
图6为ACC系统雷达测距测速的工作示意图。
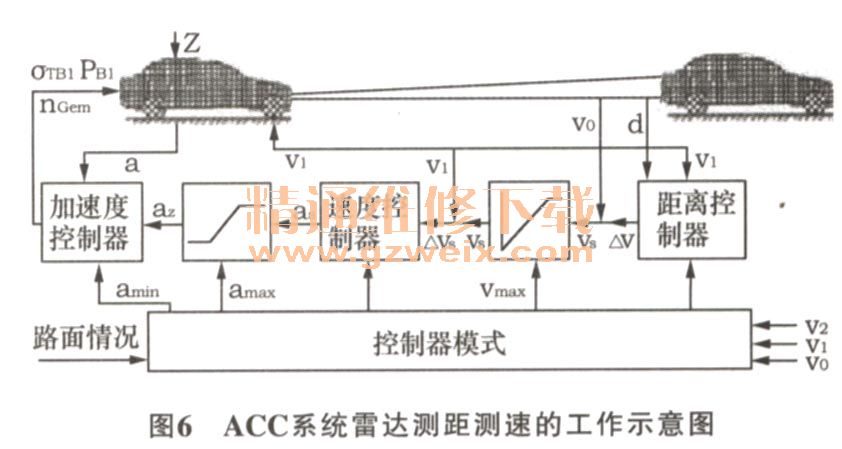
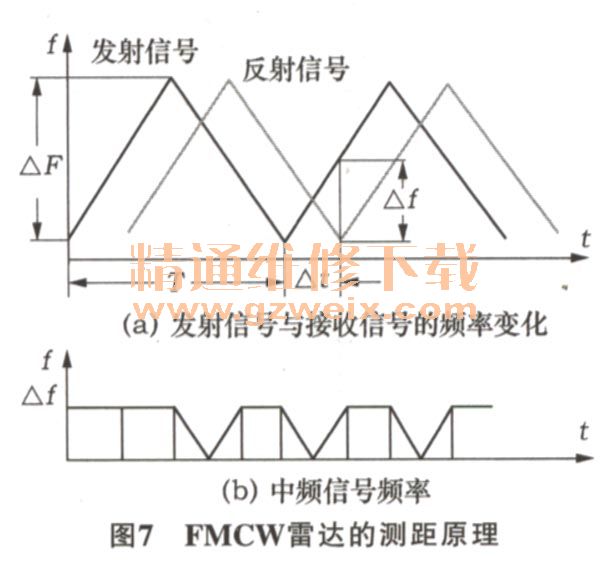
毫米波FMCW雷达系统的测距测速是通过天线向外发射连续调频毫米波,并接收目标的反射信号。发射波的频率随时间按调制电压的规律变化。一般调制信号为三角波信号,发射信号与接收信号的频率变化见图7a。反射波与发射波的波形相同,这个相位差即是时间上有一延迟(△t) 。△t与目标距离R的关系式为
△t=2R/C
式中:C----光速。
")
")
")
")

