・上一文章:宝凌BL-280型汽车音响收音声小且噪声大
・下一文章:奥迪A6L右侧两门玻璃无法升降且无法打开

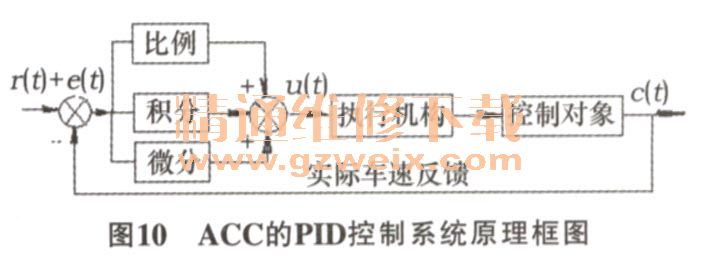
PID的调节器需给出微分方程和传递函数,它将设定车速:(t)与实际输出值。(t)的偏差AV,其比例(P)作为控制量,以控制节气门开度,使车速迅速接近设定车速。考虑过程中偏差一直存在,积分(I)部分把偏差积累起来加大控制量,以消灭偏差,使车速保持稳定。微分(D)部分则起预估作用,当△V >0时,表示偏差在加大,应及时增加控制量,使△v减小;当△v<0时表示偏差量在减小,则减小控制量,以避免△V趋于0时,又向反方向发展而引起振荡。该自动控制原理基于通过线性组合构成控制量,对控制对象(物理参量)进行闭环控制的系统。虽然有结构简单、参数整定方便等优点,但有时被控对象的特性会出现非线性或瞬变过程,常规的PID控制若参数调整不当会造成系统振荡,须由算法的技巧来解决。其控制规律的实现是通过软件来实现的。改变控制规律,需要改变相应的程序。
汽车厂家将模糊控制(Fuzzy Control)应用于巡航控制系统。FC是一种模仿人类控制活动中人脑控制思维的控制策略,运用模糊数学把人工控制策略由计算机实现。驾驶者对汽车的控制本质上是一个模糊控制的过程。驾驶者驾驶汽车,他会自觉地根据目标车速和实际车速之间的偏差和路面情况,利用自身经验,决定加速踏板的变化量,从而使汽车车速趋近于目标车速。模拟这一过程的汽车巡航控制的模糊控制器,输入量可选择设定车速(存储在RAM中)和实际车速的偏差以及偏差的变化率来实施,它处于动态刷新中。如图11所示。
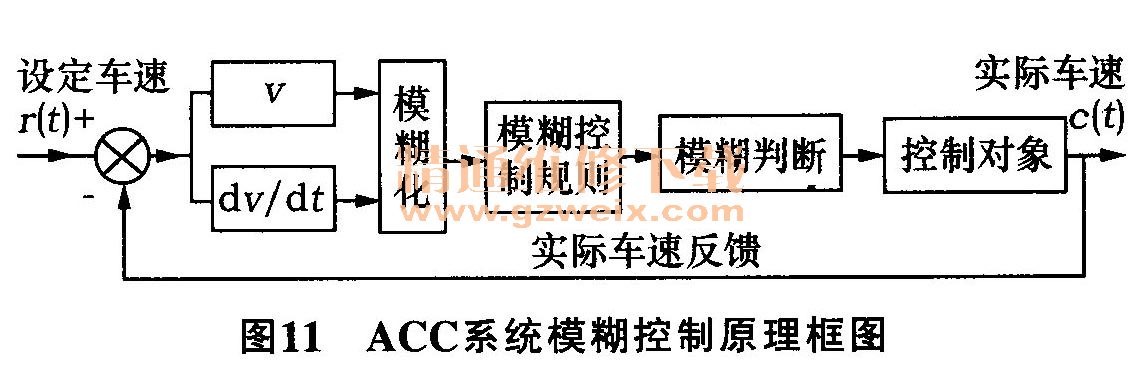
模糊控制不依赖系统的精确数学模型,故对系统的参数不甚敏感。其不足之处是模糊控制规则的获取和模糊隶属函数形状的确定须认真应对,一旦系统确定,其规则和隶属函数难以随外界和车辆参数的变化进行调整。即不经调试,某一车辆的ACC装置不能简单与他车互换。对物理参量进行模糊控制的理论介绍可查阅参考文献,此处不赘述。
系统所有信号采集、输入指令都以数字形式直接存储和处理。微处理器根据指令车速及其他输入信号,按给定程序完成所有数据处理,并产生步进电机驱动信号输出,改变节气门开度。数字系统受温湿度影响小,稳定性好,便于在微处理器上编程或修改程序,实现新功能,因而节省昂贵的硬件开支。
3ACC系统软件流程
从模块化角度,ACC系统微控制器软件编程由如下模块组成:初始化、键盘扫描、启动判断、通信、中断、定时和看门狗等。ACC系统软件流程如图12所示。

软件流程为:系统检测按键是否按下,当巡航开关接通时,启动判断程序判断车速采集程序获得的车速信号是否在可巡航的范围内,此时设定键有效时实际车速应维持在此时速度。定时程序模块实现定时,达到定时点的时间时实施中断,采集实际车速与设定值进行比较,若差值在误差允许范围内不动作;若不在,则进入电动机转速控制的程序实现车速整定。当检测到加速或减速按键按下时,首先修改车速设定值,然后进入电机转速控制的程序实现加速或减速;当检测到制动开关接通时,退出巡航控制系统。
4结语
现代化汽车已成为一个移动的科技展示平台。汽车制造商正在迅速开发越来越多的创新技术,它们使汽车变得个性化和自动化。微控制器、信息技术的应用,使汽车具备越来越多的自主功能;德国的工程技术、高强度的车辆结构使我在这次严重车祸中幸免于难;在驾驶辅助、自动驾驶和信息娱乐方面德系车处于创新的最前沿。研究自动驾驶系统,让车辆自己完成工作的技术,大众公司处于领先地位。而奥迪的举措之一是对谷歌Andrrid操作系统的整合应用,也能让驾驶者进入ACC时双手离开转向盘。
介绍一个亲历的事故及其处理经过,并奉上我的色芜之见与同道们共同切磋,希望成为一则给力的维修文本。
")
")
")
")

