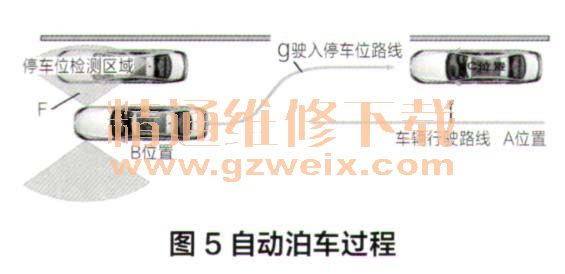
2.自动泊车
当车辆从A点以小于16km/h的速度驶过停车位(C位置)到达B位置时,右前长距离探测雷达已经监测到停车位C的长度和宽度(图5)。当停车辅助模块根据所获取的停车位信息与车辆自身尺寸对比后(判定能满足停车空间),并通过短距离雷达所获取的信息计算好泊车路线“9”后,仪表会提示“Start Park Assist Yes or ON”,询问是否启用自动泊车系统(图6)。
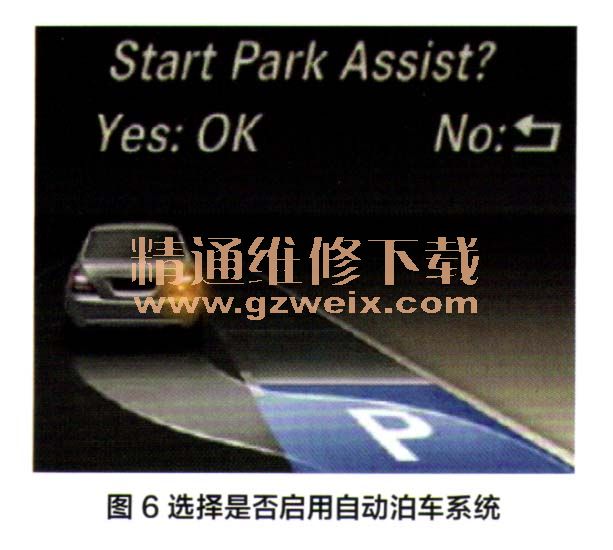
在点击OK按钮进行确认后,驻车辅助模块通过Flex Ray与CAN网络通信要求仪表、ESP车身稳定系统、
EPS电动助力
转向系统配合完成泊车工作,仪表此时会显示“请注意周围环境”和“请自行加速”警告信息。自动泊车开始后驾驶员应将双手从方向盘上移开,只需根据仪表提示进行换挡、加速,此时方向盘完全由电动助力转向控制系统“掌控”,
EPS根据需要进行自动制动。
在整个自动泊车过程中,ESP控制单元会按照停车辅助模块的“意愿”选择性地对某一车轮制动,目的是缩小转弯半径尺,使车辆最终以最佳、最短路线进入停车位。所以当遇到很“狭小”的停车位时,驾驶员不一定能停得进去,而带有自动泊车功能的车辆可以!
一旦泊车完成,车辆到达停车位后,仪表盘显示“泊车完成一请接手”信息(显示5秒钟),并通过“仪表”扬声器发出声讯警告。
3.驶出纵向车位
该功能只有在事先用自动泊车系统进行了泊车的情况下才能启动。在驾驶员需要驶出纵向车位时,只要按下转向信号灯,并挂入行驶挡位“D”或“R”,仪表盘就会提示“是否启用泊车系统”退出车位的问询。得到驾驶员确认后,泊车系统便会自动“接管”车辆的转向和制动工作,使车辆朝着所打转向灯的方向从车位中驶出(图7)。在此过程中,驾驶员只需要操纵加速踏板即可,另外,该功能只针对纵向停车位。
 系统通讯网络
系统通讯网络
在自动泊车通讯网络中CAN总线具有双向性,即能传输又能接收信息。N73作为中央网关构成了Flex Ray与CANHMI(用户界面CAN)的数据接口,不同CAN网络之间的通信需要借助N73来完成,即N73具有确定信号优先权和转换为CAN信号类型的作用。如图8所示,箭头指向代表信号的传输方向或控制方向,如N62促动车距传感器(B8/1—B8/12),而传感器又将监测的信号传送给N62。

N62利用测得的停车位大小和位置,计算所需的转向角,实际转向角由N49记录,并传输给N80分析和处理,然后N62和N80将各自的转向角信息传送至Flex Ray总线的其他控制单元,N68据此相应的促动A91 m1,带动转向机运转,将电机的旋转运动转化为平行运动,实现自动转向。同时,A91 b1还会监测转向机上的齿条运动,N68读取A91 b1的信号后将齿条运动的相关信息传送至N62,从而对自动转向进行精确控制。在泊车过程中所需要的制动力以及车辆至障碍物的距离,由N62传送给N30/4,N30/4据此计算出相应的制动力矩,并实施制动。此外,ESP还通过Flex Ray传送车速信号。为了输出驾驶指示和信息,N62将相应的请求通过中央网关传给A1,以显示相应的泊车信息或促动H4/61仪表盘扬声器。
相关资料:2015年4月奔驰WIS维修系统上一页 [1] [2]
")
")
")
")

