・上一文章:大众凌渡车门解锁默认设置无法更改的解决方案
・下一文章:漆面缺陷处理之流挂处理
二、安全及舒适系统
1.电子机械式驻车制动系统(EPB)
全新速派用电子机械式驻车制动器替代了传统的手动驻车制动器。电子机械式驻车制动系统(EPB)是指将行车过程中的临时性制动和停车后的长时性制动功能整合在一起,并且由电子控制方式来实现停车制动的技术。
电子机械式驻车制动系统主要由电子机械式驻车制动控制单元、驻车制动执行器、驻车制动按钮等组成。电子机械式驻车制动器的控制软件被集成在ABS控制单元J104中(图14)。横向加速度传感器、偏转率传感器、纵向加速度传感器等也集成在J104中。制动执行器是一个电控机械式伺服单元,它集成在后车轮制动钳中(图15)。


电子机械式驻车制动系统主要借助电机、两级蜗杆传动装置以及螺杆传动装置将“操作驻车制动器”的指令转化为精确的制动力,从而使制动摩擦片压紧到制动盘上(图16)。

2. MDF智能灯光辅助系统
智能灯光系统是一套根据当前交通状况自动开关远光灯的系统。当前的交通状况由控制单元内的摄像头来侦知,并在该控制单元内的运算器中进行分析处理。图像处理软件会在摄像头的图像中搜寻光源。该控制单元内的软件将识别出的光源分为下面几类:前大灯、尾灯、路灯,以及与本功能不相关的其他光源。如果能准确判断出光源,那么控制单元就会在摄像头图像上确定出识别出的其他车辆的位置,并估算与本车的距离。这两个值通过扩展CAN总线被提供给弯道灯和照程调节控制单元J745进行灯光的自动控制。
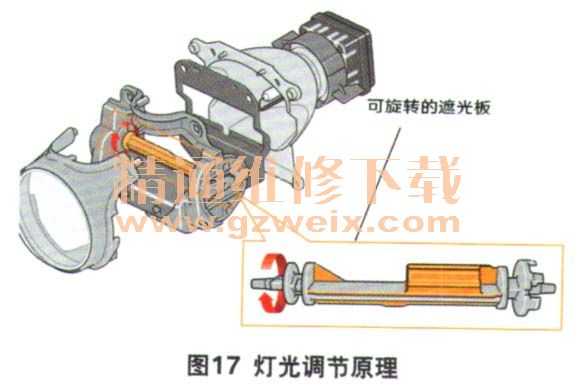
为了能够实现MDF功能,使用一个可旋转的遮光板或遮光器调节大灯。该遮光板带有5个不同的遮光点。通过一个电机对遮光板进行无级控制。这表示通过旋转可以到达各个位置(图17)。
3. PLA 3.0泊车辅助系统
升级版的PLA 3.0系统第一次出现在上海大众的车型上,升级了泊车算法,系统灵敏度进一步提高,泊车过程更加精准快速(图18)。新增车头进入式垂直泊车,一键系统自动选择泊车模式,泊车更加智能。当车辆经过车位,并通过全车12个雷达识别到车位时,用户只需根据提示将挡位挂入倒挡或D挡,控制加速踏板和制动踏板,PLA系统能自动通过多次移位实现泊车入位。

4.自适应巡航控制系统ACC
自适应巡航控制系统是对车速进行智能调节的定速巡航装置(图19),可以平缓地进行车辆加速和减速,来保持驾驶员所选定的与前车的距离,更好地提高驾驶舒适性。

与前车距离的识别过程通过对目标对象的图像处理和识别在驾驶员辅助系统前部摄像头R242内部运行。接着,在摄像头中所确定的识别对象位置数据,被传输至车距调节装置控制单元J428。在车距调节装置控制单元中,将摄像头的对象数据与雷达所采集并绘出的对象进行比较(融合)。
5.车道保持辅助系统LA
长时间的沿车道行驶会使驾驶员注意力分散,导致车辆偏离行驶车道。车道保持系统可以进行辅助性的转向干预,帮助驾驶员将车辆保持在车道内。
车道保持系统的信号来自以下4个部件。
(1)前部摄像头
前部摄像头的信号用于车道宽度判断,以及虚拟车道计算。
(2)ABSIESP控制单元
ABS/ESP控制单元负责进行轮速、车速判断。
(3)转向角传感器
转向角传感器的信号用于车辆前进方向与虚拟车道比较。
(4)转向力矩传感器
转向力矩传感器用于转向力矩判断。
车道保持系统的执行部件为EPS电动助力转向系统,根据车辆前进方向与虚拟车道之间的夹角,判断修正的方向与修正的力矩(图20)。

")
")
")
")

