・上一文章:详解宝马车辆供电系统技术
・下一文章:浅谈汽车车身图纸识读
一、概述
在垂直动态管理系统(VDM)控制单元中,可集成以下功能:垂直动态管理系统(减震器卫星式控制单元控制,例如F01);主动式侧翻稳定装置(市场营销名称:动态行驶稳定装置,例如F15)。
在这节中描述主动式侧翻稳定装置。VDM控制单元由总线端K1. 15N(逻辑)供电。同时VDM控制单元还通过总线端K1. 30(负荷)供电。VDM控制单元的安装位置取决于车型系列。注意诊断时电路图中的安装位置活窗。
如图3-2-1所示F01动态行驶稳定装置的控制单元安装的位置。
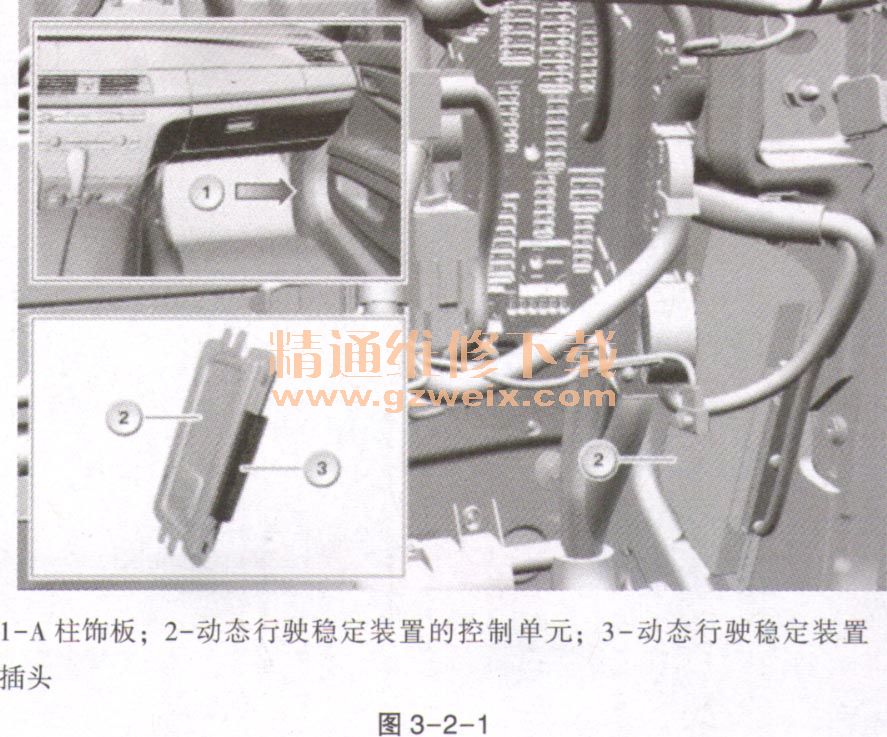
动态行驶稳定装置可防止或降低车辆在急转向或快速避让操作时的侧倾程度,从而提高振动舒适性,优化车辆的转向性能。
二、部件简短描述
将描述动态行驶稳定装置的下列部件:阀体、主动式侧翻稳定器、串联泵、吸气节流阀、机油箱和油位开关、液压油冷却器。
1.阀体
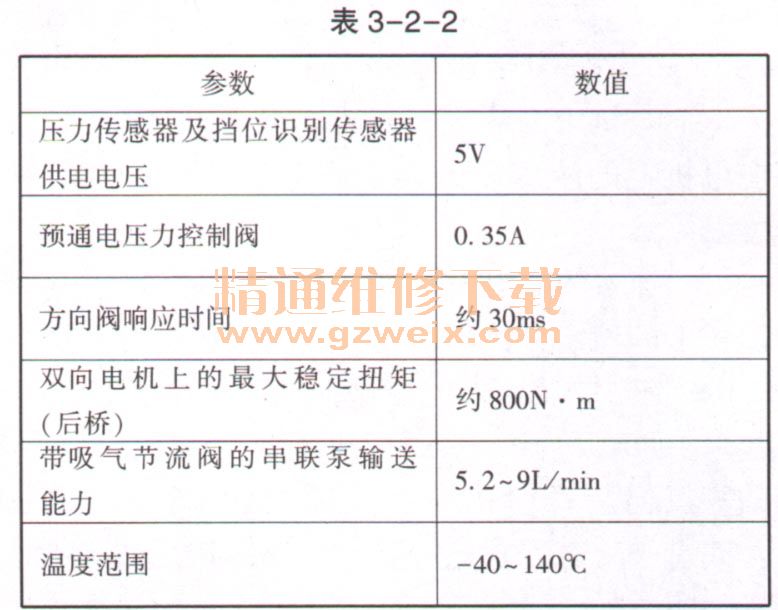
动态行驶稳定装置阀体安装在右前轮罩后面。阀体在电气上与VDM控制单元连接。前后桥的稳定杆均为分体式,在中部与双向电机连接。通过阀体,将以液压方式控制双向电机。由此可以很快速地在所需的方向上,对稳定杆施加规定的扭矩,如图3-2-2所示。
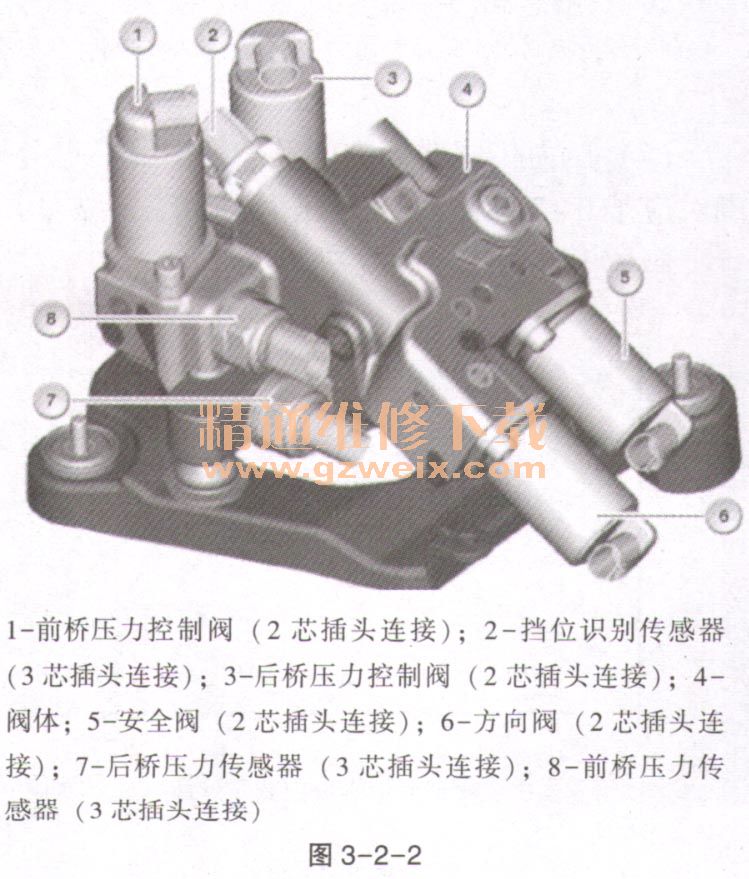
阀体安装A柱上的右前轮罩内。
将对阀体的以下部件进行说明。(1)前桥和后桥压力控制阀。这些压力控制阀位于阀体。压力控制阀由VDM控制单元控制。同时,将调节稳定杆的液压压力(压差)(最高180bar)。在直线行驶时,压力控制阀处于预通电状态(0. 35A)。油流可顺畅流人机油箱。在转向时压力控制阀通电。双向电机中的液压压力被调节到标准值。.基于设计前桥双向电机上的液压压力大于或等于后桥双向电机上的液压压力。
(2)前桥和后桥压力传感器。这些压力传感器测量前桥和后桥上的稳定杆的液压压力。传感器信号(应力)被传输到VDM控制单元。未监控通向机油箱的回流管路中的压力(循环的油流压力约2bar)。注意服务功能,为学习压力传感器的零点偏差(约0. 7V),在诊断系统中提供一项服务功能:底盘。动态行驶稳定装置、压力传感器示教。条件:发动机关闭。
(3)方向阀。方向阀由VDM控制单元控制。方向阀用于规定左右弯道中的液压油以及回流油的方向。4-2换向阀“调换”稳定杆的压力侧。方向阀是主动式侧翻稳定装置中最关键的安全部件。因此方向阀要单独用一个传感器进行监控。
(4)挡位传感器。挡位识别传感器监控方向阀的位置。挡位识别传感器按照霍尔效应原理工作。在方向阀上有一个磁性空心圆柱体,其中立有挡位识别传感器。因此挡位识别传感器可识别以下2个位置:无控制,曲线控制(0. 7 V,中间范围3. 0V 、 4. 2V)。传感器信号被传输到VDM控制单元。
(5)安全阀。安全阀由VDM控制单元控制,并且在断电时关闭前桥双向电机(液压锁定)。在下列条件下断开安全阀:电流供电中断以及出现系统故障。后桥双向电机以液压方式与机油箱的回流管路连接。由此将对系统压力进行限制,并形成循环液流。
(6)结构及内部错接。挡位识别传感器以及两个压力传感器由VDM控制单元供电(预供电电流0. 35A,最大电流2.5A)、 VDM控制单元的压力控制阀按脉冲宽度调制控制(5%~95%)。方向阀以及安全阀可以通电也可以不通电(受控或不受控),如图3-2-3所示。
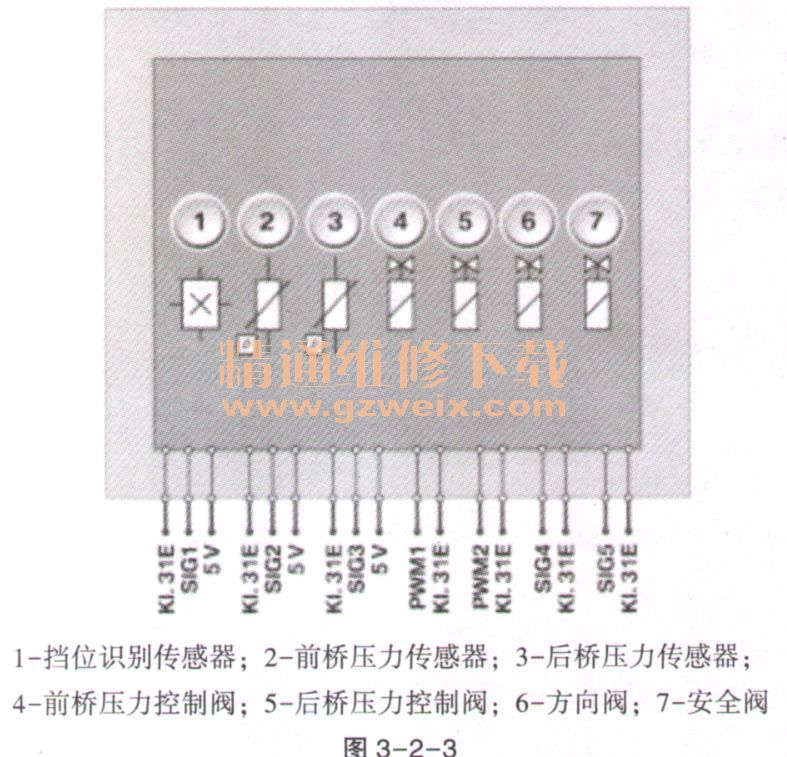
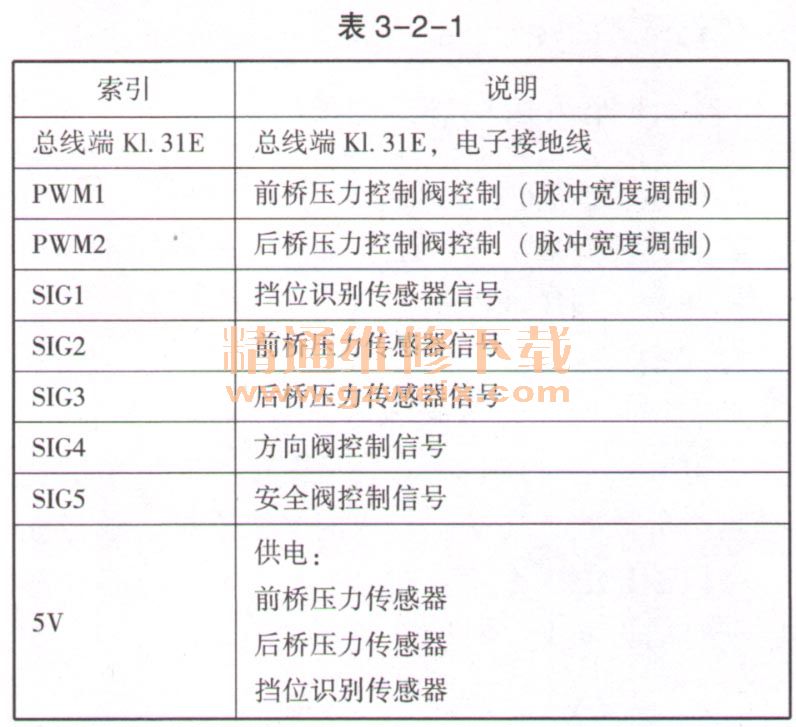
线脚布置见表3-2-1。
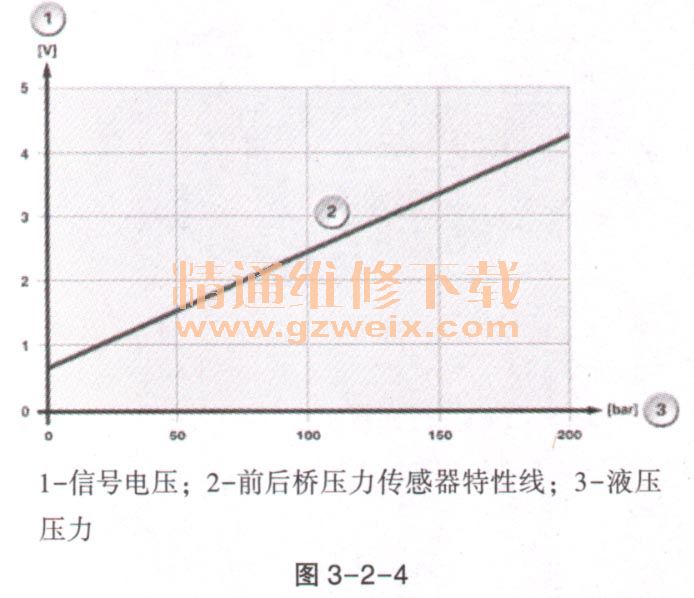
(7)压力传感器标准值及信号曲线。可分析的液压压力信号根据压力变化而变化。0.5~4. 5 V的测量范围对应于0~200bar的液压压力,如图3-2-4所示。
(8)部件失灵。在阀体上的一个部件失效的情况下,预计将出现以下情况:垂直动态管理系统控制单元(VDM)内出现故障代码存储记录;组合仪表上出现检查控制信息。
2.主动式侧翻稳定器
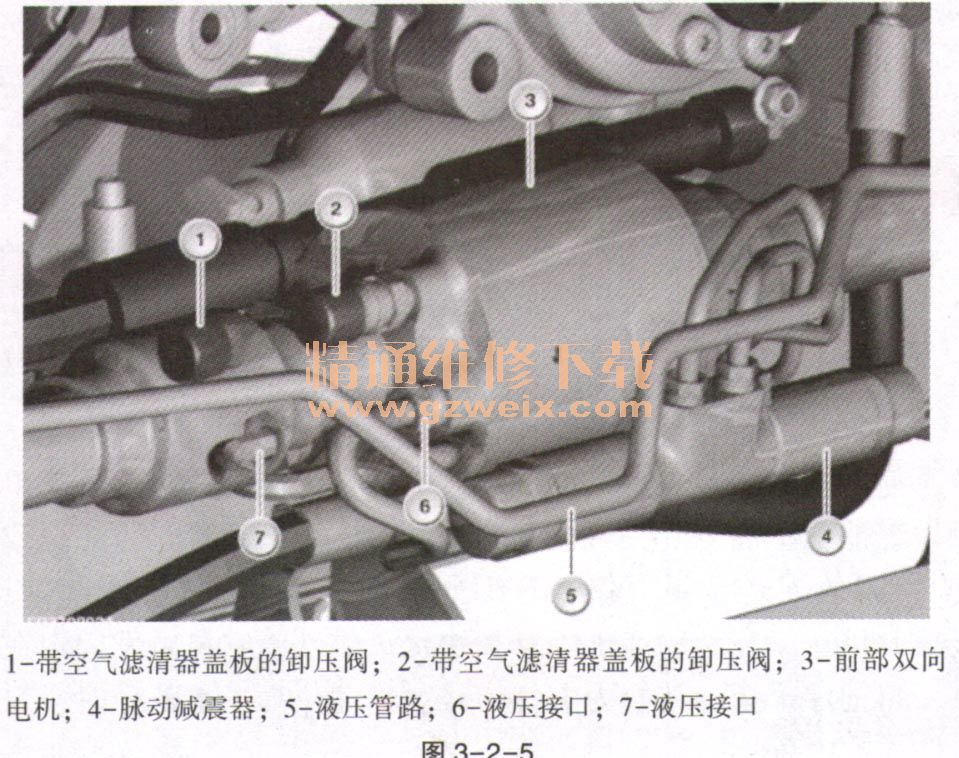
主动式侧翻稳定器在中部垂直分开。主动式侧翻稳定器由双向电机和安装在双向电机上的稳定半杆与压力套装的滚动轴承组成。双向电机的轴和壳体分别与一根稳定半杆连接,在双向电机中分别将对置的空腔相互连接,因此在空腔内分别具有相同的压力,通过一个接头为两个空腔供应高压机油。另外两个空腔与通往储液罐的回流管路连接。通过不同大小的压力产生不同大小的力,由此产生一个使轴相对于壳体扭转的扭矩。因为一个稳定半杆与轴连接而另一个稳定半杆与壳体连接,两个稳定半杆相互扭转,由此产生的扭矩对侧倾起稳定抵消作用。系统压力最大可为180bar,如图3-2-5所示。
")
")
")
")

