⑨不同的光分布(根据各国规格)。不同的光分布使车辆前的车道照明得到了扩展。根据脚部空间模块(FRM)的请求,大灯驱动模块通过步进电机控制转动模块并进行光分步。各个光分布间的转换无级进行。结合特殊装备“自适应转向灯”可实现以下附加车灯功能,如图5所示。
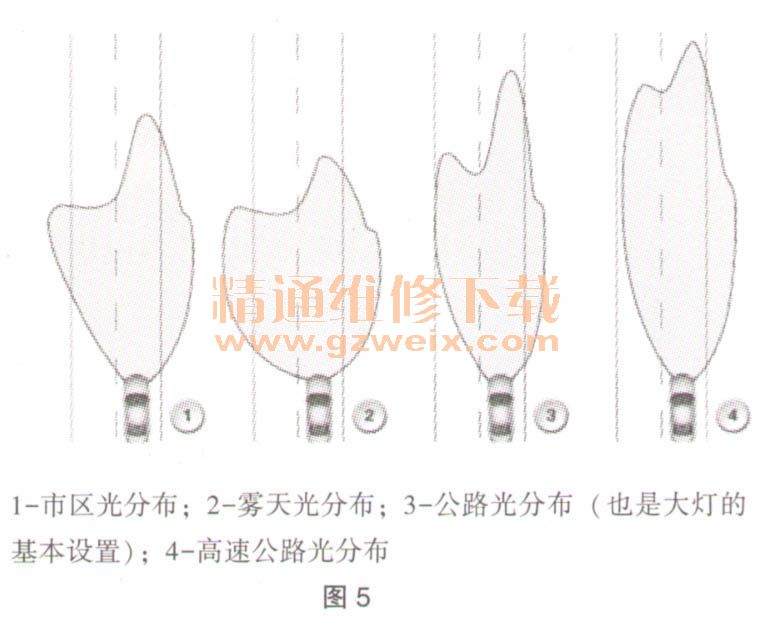
车辆启动。在开关位置“A”(自动车灯控制的开关位置中的车灯开关)和端子15开位置,两个大灯进行基准运行。也就是说:两个摆动模块按照最小速度向下运动,然后进入标准位置(车辆位于墙壁前方时可以看见,光束向下移动并最终重新返回向上)。驶入的额定位置取决于车辆的负载状态。当发动机启动后,大灯驱动模块首先控制市区光分布。
市区光分布。市区光分布实现了低速行驶时左侧车道的照明。其中,左侧大灯约向左转动约12°,向下转动约0.7°。市区光分布在发动机启动后达到约50km/h的行驶速度时激活。
公路光分布。公路光分布符合已知的近光灯。行驶速度超出约50km/h后,市区光分布转换为公路光分布。行驶速度低于约50km/h时,脚部空间模块(FRM)将光分布重新转回市区型。公路光分布显示大灯的基本设置。总系统出现故障时,基本设置接受光分布。
高速公路光分布。高速公路光分布扩大了行车灯的作用范围。其中,左侧大灯约向左转动约3.5°,向下转动约0.25°。右侧大灯向上转动约0.2°。如果以110km/h以上的速度行驶长于30s或速度超出140km/h,则脚部空问模块关闭高速公路光分布。如果速度降到110km/h以下,根据行驶速度重新设定大灯。期间步进式复位(110km/h-100km/h-90km/h-80km/h)。速度达到80km/h以上后,启动公路光分布。
雾天的光分布。雾天光分布随着前雾灯的打开而激活。雾天光分布可与市区光分布和公路光分布结合使用。其中,左侧大灯向左转动约8°,向下转动约0.7°。如果为了使用雾天光分布而激活远光灯,则大灯摆回基本位置,即公路光分布。
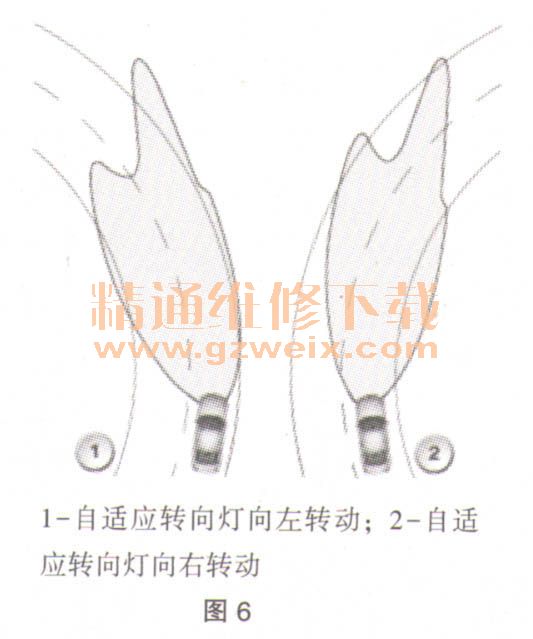
⑩自适应转向大灯。脚部空间模块(FRM)是自适应转向灯的控制单元。自适应转向大灯在转向时把双氙气灯转动到弯道内侧区域内。大灯的转动范围:向内,即向车辆中部:最多不超过10°;向外:最多不超过15°。例如右转:右侧大灯转动至15°(右侧大灯在右转时是“弯道内侧”的大灯)。从车辆向外观察,右侧大灯“向外”转动。左侧大灯转动至10°(左侧大灯摆向车辆中部,从车辆向外观察“向内”转动)。弯道外侧大灯(左侧大灯)必须和弯道内侧大灯(右侧大灯)同时到达极限位置,这样才能均匀轻柔地照过街道。脚部空间模块通过LIN总线向大灯驱动模块发送转动模块的额定值(转动模块的位置和速度)。根据脚部空间模块的输入信号,大灯驱动模块控制步进电机来调整大灯中的转动模块,如图6所示。
上一页 [1] [2] [3] 下一页
")
")
")
")

