学习控制是指
ECU的存储器在工作过程中步进电机不同的正反转步数相对应控制阀的开度的记录。而发动机随运行时间的积累使用性能和技术状态会发生变化,
ECU通过反馈控制使怠速转速与设定的目标值保持一致,还能直接调用存储器里往昔的经验数据。起动初始位置的确定是应对改善发动机的再起动性能。点火开关进入关闭状态后,
ECU控制ISCV处于全开位置(步进电机处于125步级),供下一次起动作准备。故前一次运转结束,点火开关断开后不得即时停止对
ECU与步进电机供电(至少延时2s),通过
ECU内的主继电器进行控制,待步进电机回归起动的初始状态方可断电。
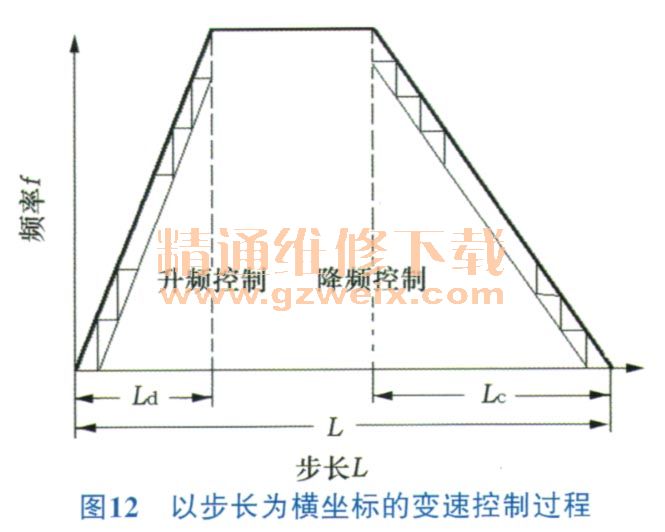
如今为实现精准控制,对控制方案开创新思路。步进电机带负载时,其起动频率要低于最高空载起动频率。步进电机的矩频特性表明,起动频率越高,起动转矩越小,带负载能力越差:当步进电机起动后,进入稳态的工作频率又远大于起动频率。可见,一个静止的步进电机不可能即时稳定到较高的工作频率,须在起动的瞬间采用加速措施。一般说来升频的时间为0.1~1s;反之,从高速运行到静止也应该有减速的措施,减速时的加速度绝对值比加速时的加速度更大。故需引进一种变速的控制程序。其基本思想是:在起动时,以低于响应频率f的速率运行,然后较慢加速,加速到一定速率fe后,就以此速率恒速运行,当快要到达终点时,又使其缓慢减速,在低于响应频率f的速率下运行,直到走完规定步数后停机。这样步进电机便可以以最快的速率走完所有规定的步数而不失步,极大地提高了效率。其过程如图12所示。
3.3两种怠速控制装置
怠速控制阀依其阀门进气量调节方式不同有节气门直动式和旁通空气式两种基本类型,也就有两种不同的怠速空气道的进气量控制方式。前者是直接控制节气门开度,后者则是以控制怠速旁通空气道截面大小为基本特征。旁通气道又有单旁通、双旁通、三旁通与多旁通等数种。节气门直动式由电动机、减速齿轮机构丝杠机构和传动轴等组成。步进电机旁通空气式因其各种优势近年有广泛的应用。
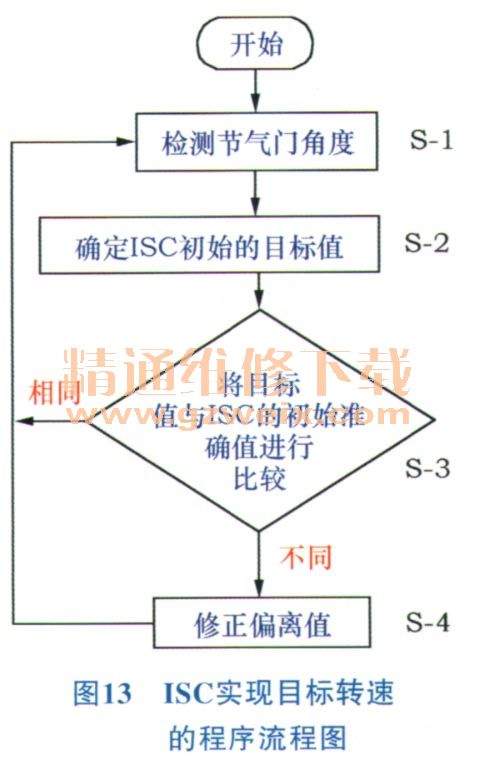
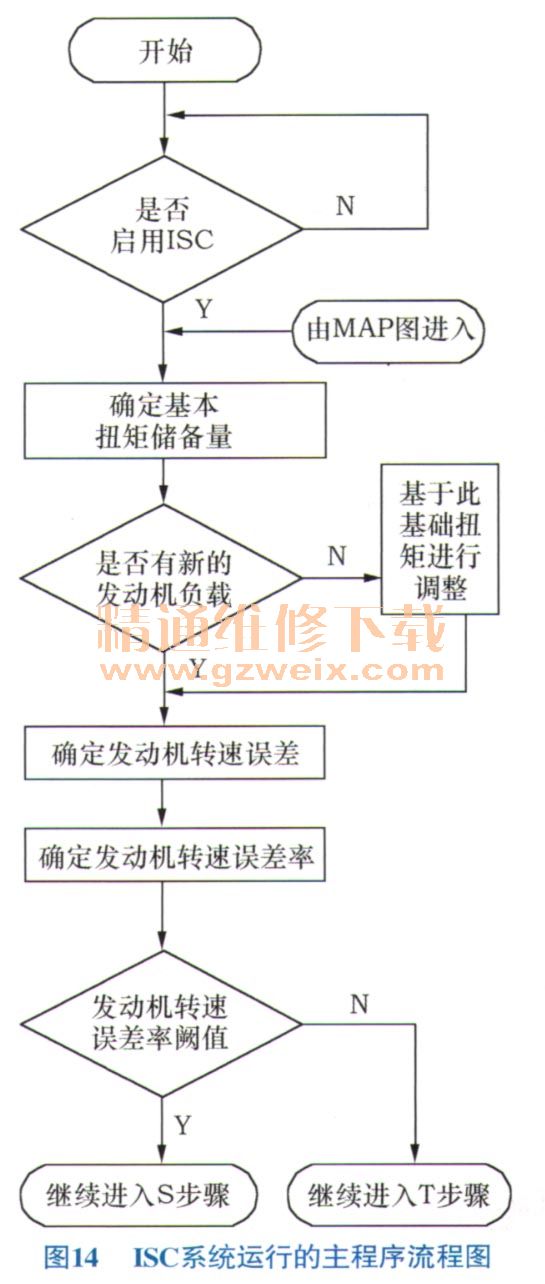
3.4 ISC系统运行的程序流程
怠速工况运行,系统编程是MCU驱动控制的核心。图13绘出了ISC实现目标转速的程序流程图。图14绘制了ISC系统运行的主程序流程
ISC系统作为电子控制发动机的一个子系统。它在
ECU里并不单独设置,而是与燃油喷射系统、点火系统等共用一体,简化了系统,亦提高控制精度。
目标转速的确定,除冷却液温度传感器信号、空调压缩机接通信号、自动变速器挡位信号之外,还有
蓄电池电压等信号。怠速时,加速踏板虽然完全松开,油门近乎关闭,但节气门并不完全关闭,而是通过它提供怠速空气。
上一页 [1] [2] [3] [4] [5] [6] [7] [8] 下一页





