・上一文章:国内电动汽车和直流充电桩兼容性测试和分析
・下一文章:2015~2016年奔驰E260L(W212)(2.0L M274)发动机正时校对方法
2 自适应尾灯的控制策略
2.1自适应前照灯和自适应尾灯的差异
自适应前照灯(AFS)与自适应尾灯(AIDS)的控制策略有明显的差异。前者主要是要求前照灯光在车身各种姿态下能进行调整,以便提供适应城市道路、乡村路面、高速路面、交叉路口、弯道等路况下的照明,同时避免给对方来车驾驶员造成眩目,引起交通事故。自适应前照灯控制策略的输入来自转向盘转角、车速传感器以及车身前后高度传感器,通过步进电机实现水平和垂直方向的灯光调节,使得驾驶员具有更好的视角范围。
而自适应尾灯主要与环境照度有关,它需要对自身的亮度进行优化,以便其他道路使用者能更加清晰地看到该车的工作状态。自适应前照灯和自适应尾灯的功能相似点在于都是为了防止给其他道路使用者产生眩目,减少交通事故。
2.2自适应尾灯的控制原理
通常而言,基础型自适应尾灯的原理框图如图2所示。

雨量照度传感器是自适应尾灯的重要部件,主要感知黎明、黄昏、桥梁和隧道、树林等情况下的环境照度,这些信息一般是处于白天状态的信息。而近光开启一般发生在晚上,近光的开启一般伴随着位置灯的开启。因此近光的状态除了提示BSI系统处于夜间工作模式,同时也是为了开启位置灯。前刮水的状态主要有两层含义:开启或关闭状态,刮水挡位状态。开启或关闭状态信息主要提醒BSI车辆是否处于雨雪天气。而挡位状态主要是提供雨量大小的信息,BSI根据这些信息来判断是否需要将尾灯亮度调高或调低,以便让其他道路使用者能更清楚地识别该车的运行状态。
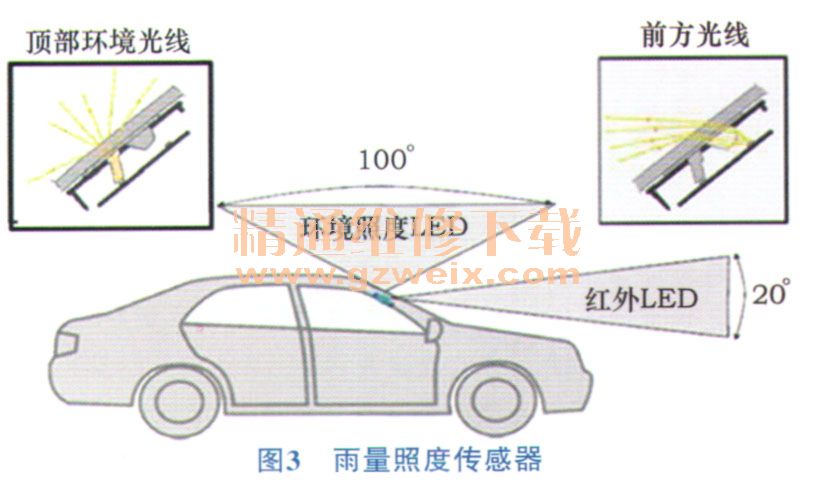
雨量照度传感器(图3)的功能之一就是感知亮度。在目前的传感器中,照度感知一般基于2个方向:垂直向上的照度感知和水平向前的照度感知。前者主要用来判断天空的照度情况,继而来判断是白天还是黑夜时刻。水平向前的照度感知主要用来感知车辆周围的环境照度(以向前方向为例),该环境照度也将作为系统BSI输入和计算的重要基础。
为保证自适应尾灯能根据环境照度来实现亮度调节,在照度的阈值定义方面,一般会将照度分为4个等级:非常亮的白天、中间状态(激活状态的门槛值)、一般亮度的白天和一般亮度的夜间。如果自适应尾灯的控制信号由车身给定,则这些信号将通过车身控制器处理后直接给尾灯供电。
对于更为先进的自适应尾灯系统,在自适应尾灯激活后的整个过程中,除了根据环境照度、驾驶状态和前刮水状态来设定特定的尾灯亮度外,还会根据道路车辆的周围环境来进行识别,比如车辆离后方跟随车辆很远时、后方车辆逐渐靠近时、离后方跟随车辆很近时或者后方车辆逐渐超车并远离时。这4种状态时后方驾驶员通常所处的4种状态,是一种快速动态且较为复杂的信息,都需要在先进自适应尾灯上加以考虑。





