・上一文章:国内电动汽车和直流充电桩兼容性测试和分析
・下一文章:2015~2016年奔驰E260L(W212)(2.0L M274)发动机正时校对方法
3 自适应尾灯照度范围定义
除了上述技术上的要求,自适应尾灯最重要的是对视觉能见度进行定义,以便既能让道路使用者能很清晰地看到前方车辆的工作状态,同时又不会因眩目而产生不舒适感,导致驾驶疲劳或交通事故。目前的研究缺乏统一有效的评价能见度的光学标准,因此在照度范围方面的研究一直存在难度。本文通过模拟试验,进行了试验研究。
3.1试验描述
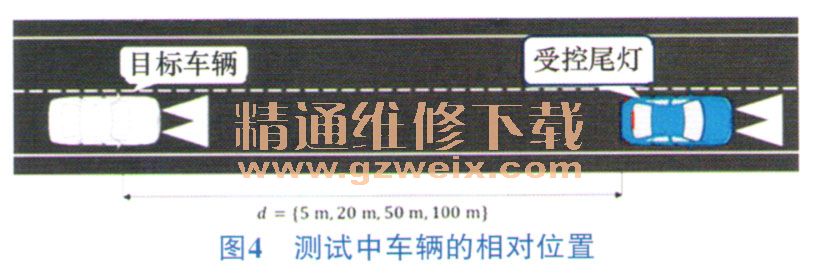
在如图4所示室外试车跑道上静止的两车相距一定的距离,后面车辆中的被试对前面车辆尾灯的光强进行1~9分的评价。试验设置了2个变量:一是前车尾灯的光强,总共设置了5种光强(最大光强173 cd的3%、11%、28%、57%和100%);二是两车的距离,共设置了4种距离(5 m、20 m,50m,100m)。
该试验在室外进行,以便能完全模拟真实的驾驶环境。该试验将可能影响尾灯亮度的因素降低到最低在模拟过程中,道路上没有其他道路使用者(行人或其他车辆),每条道路的宽度大约为3.75 m.该试验主要采用静态评价的方式,2台车之间保持一定的距离,车内有驾驶员。
为了调节尾灯的亮度,开发了2个电控单元。其核心控制部分在图5中有描述。图5中前一个单元安装在车辆的前部,通过提供占空比信号给尾灯供电通过无线电模块接收到占空比信号后,对尾灯的亮度进行调节。第2个模块放置在车内用于测试。这个模块包含2个部分,分别连接计算机和无线电发射器。整个测试由操作员通过软件设置来完成,该软件主要用于产生占空比,并通过无线电模块发送给其他车辆。采用输入装置,将尾灯的亮度进行调节。系统所有的数据(包括驾驶员的数据、2台车辆之间的距离以及占空比)都通过软件来设置和保存。

3.2测试流程
在测试过程中,2台车的近光均打开,以便模拟在夜间驾驶的环境状态。主驾驶员和副驾驶员同时进行测试和观察。在试验中,2个驾驶员都需要观察前方的尾灯,其中主驾驶员观察左尾灯,副驾驶员观察右尾灯。
整个过程需要完成车距为5m、20 m、50m和100 m的测试。在每个测试车距里,需要测试5个照度水平:最大照度(173cd)的3%、11%、28%、57%以及100%。每个照度都要随机测试3次。5s后制动灯会自动关闭,然后测试人员采用9个等级的打分方法给制动灯打分。表1展示了9个等级的打分方法。






