・上一文章:大众迈腾轿车ESP指示灯点亮
・下一文章:奇瑞艾瑞泽7e插电式混合动力模式定义
3 混合动力汽车CAN总线拓扑
3.1串联式混合动力电动汽车CAN总线拓扑
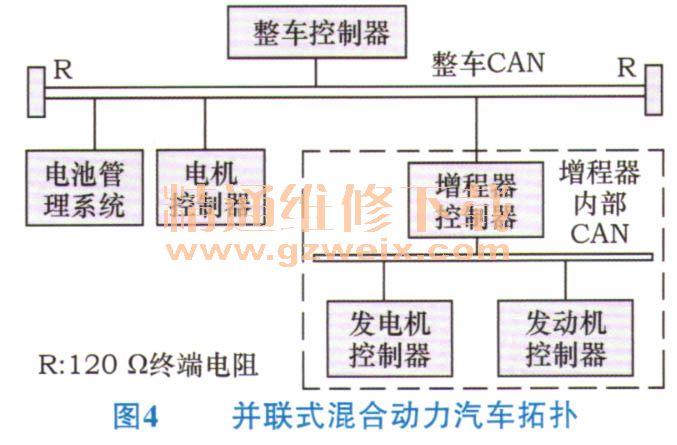
串联式混合动力汽车,汽车行业内也称为增程式电动汽车,指整车配备有辅助动力单元(APU,也称为增程器)的电动汽车。增程器系统包括APU控制器、发电机及发电机控制器、发动机及发动机控制器。增程器的作用是:在电池电量不足的情况下,开启增程器发电给电池充电,从而达到增加整车续驶里程的目的。增程式电动汽车中,发动机不直接驱动车辆运行,而是通过发电机发电给电池充电,由驱动电机直接驱动车辆运行。从这里可以看出,增程式电动汽车,本质上是串联式混合动力汽车。对整车而言,增程器是作为一个整体而存在的,即增程器是作为一个节点挂在整车网络上。如图4所示,虚线框内的部分即为整个增程器系统,作为一个节点挂在整车CAN网络上。发电机控制器和发动机控制器只存在增程器系统内部CAN网络上,和整车控制器不直接通信,信息交互需要通过增程器控制器。
3.2并联式混合动力电动汽车CAN总线拓扑
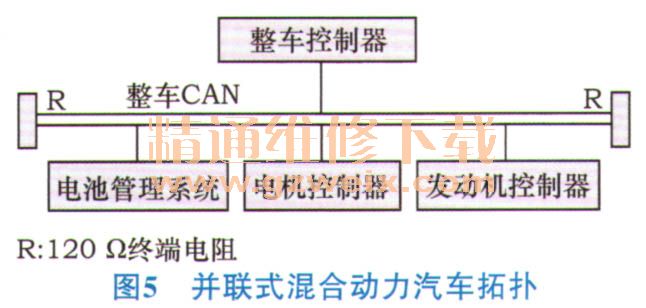
由并联式混合动力汽车的概念可知,整车配备有发动机、驱动电机2种驱动源。当电池电量充足时,由驱动电机驱动车辆行驶;当电池电量不足时,发动机工作直接驱动车辆行驶或与驱动电机一起驱动车辆行驶。对整车而言,发动机是作为一个单独节点挂在整车网络上的,与整车控制器之间可以直接进行信息交互,如图5所示。
4 混合动力汽车CAN总线通信设计
4.1串联式混合动力电动汽车
串联式混合动力电动汽车中,增程器是作为一个节点挂在整车网络上,因此信息的交互只存在于整车控制器和增程器控制器二者之间。增程器内部通信网络中,发动机控制器、发电机控制器与增程器控制器之间分别进行信息交互。整车如果想要知道发动机或发电机的相关总线信息,必须通过增程器控制器转发。同样,整车控制器对发电机及发动机的控制,也转化成对增程器系统的控制,因此发动机、发电机的具体控制都由增程器控制器来进行。串联式中整车控制器与增程器控制器、驱动电机控制器之间信息交互见表1。
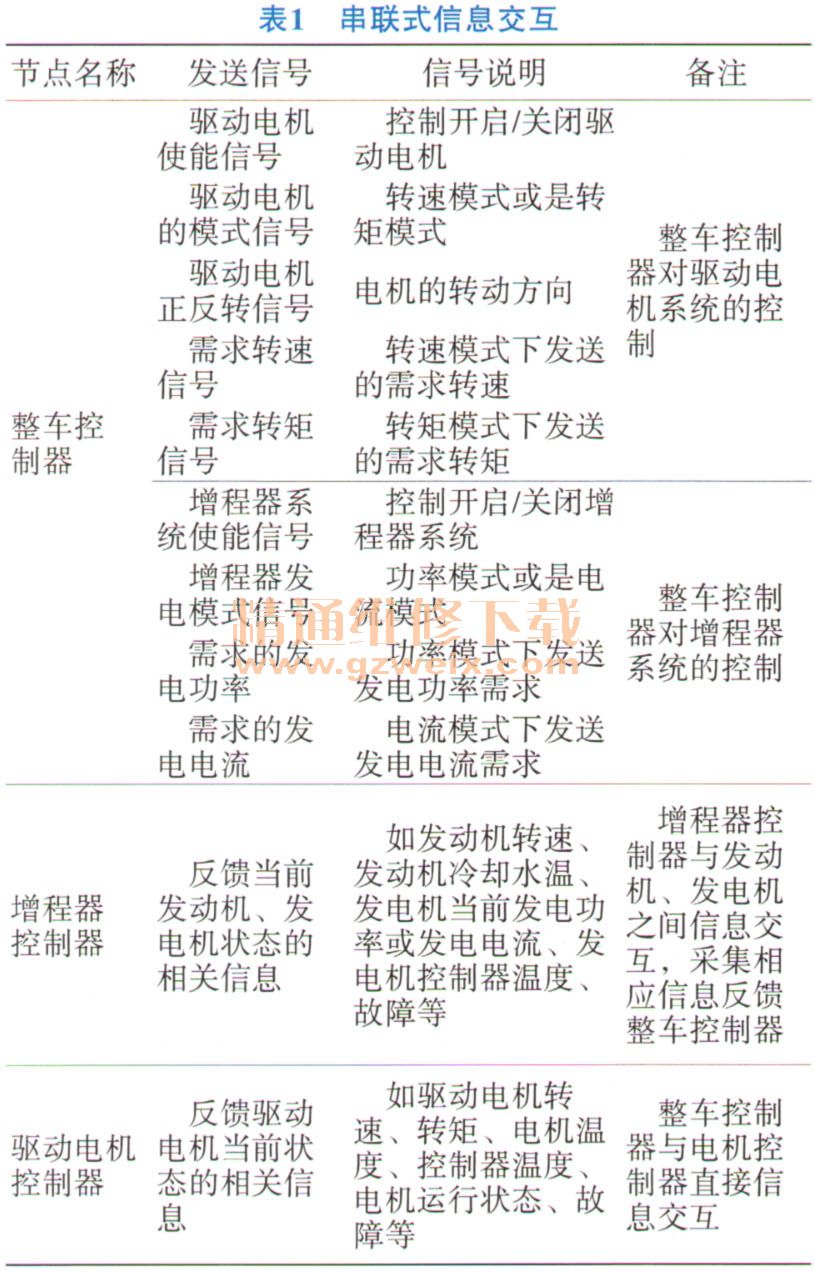
从表1可以看出,对于串联式,整车控制器是对驱动电机控制器和增程器控制器进行协调控制,从而确保整车的运行。而对增程器系统内部的通信、控制方式不去关注。整车只要提出想要关心的信息,让增程器控制器反馈即可。发动机的开启和关闭均由增程器控制器来控制。
4.2并联式混合动力电动汽车
并联式混合动力电动汽车中,发动机作为一个独立节点挂在整车网络上。因此,整车控制器需要同时对发动机和驱动电机进行协调控制。并联式中整车控制器与发动机控制器、驱动电机控制器之间信息交互见表2。
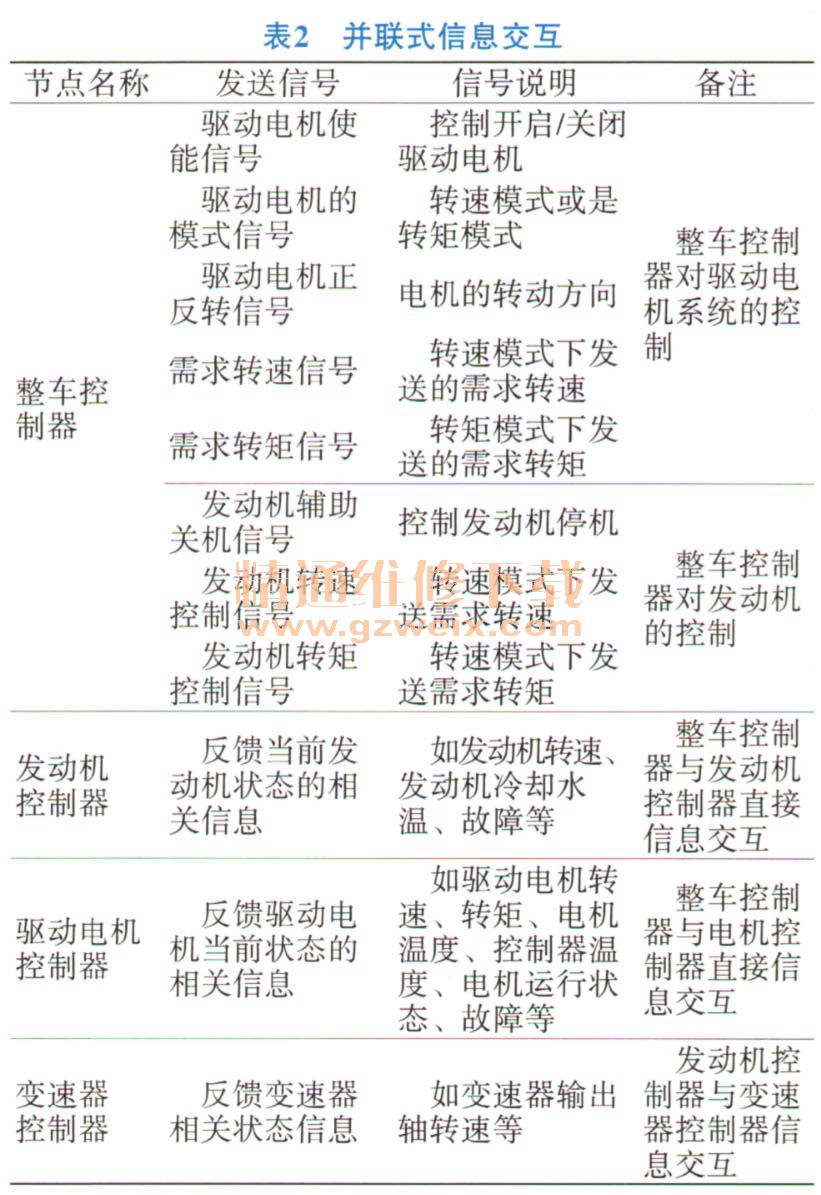
从表2可以看出,并联式混合动力电动汽车,整车控制器对发动机和驱动电机进行协调控制,而整车控制器直接对发动机控制。由于传统燃油车型中并没有整车控制器,发动机厂家开放的是其它的控制单元,例如潍柴发动机开放的控制节点是变速器。因此,整车控制器想要控制发动机,目前需借用燃油车发动机已经开放的发动机控制报文。SAE J1939标准对发动机的相关报文都给出了明确的规定,各个商用车的发动机厂家都是按照该标准执行的,因此整车控制器借用对发动机的控制报文也应该遵循该标准,否则发动机控制器将无法识别。
这里有2点要注意:一是表2中只是给出了发动机的停机信号命令,并没有给出发动机的起动信号命令。这是因为在并联式混合动力电动汽车驱动行驶中,低速情况下只需要驱动电机驱动即可;在高速稳定行驶情况下,当驱动电机驱动能力不足时,驱动电机会带动发动机起动,随后发动机将参与到驱动整车行驶。二是变速器控制器发出的变速器输出轴转速信号的作用,是为了对发动机进行保护。这是因为并联式中发动机的起动一般都是在车辆己经起动后才开启的,因此起动后需要发动机能够立刻输出扭矩,跳过怠速控制模式而直接进入驱动模式。变速器输出轴转速大于0表明在行车状态,因此发动机可以根据此信号的反馈值进入合理的控制方式。
")
")
")
")
")
