・上一文章:大众迈腾轿车ESP指示灯点亮
・下一文章:奇瑞艾瑞泽7e插电式混合动力模式定义
5 混合动力电动汽车CAN报文定义
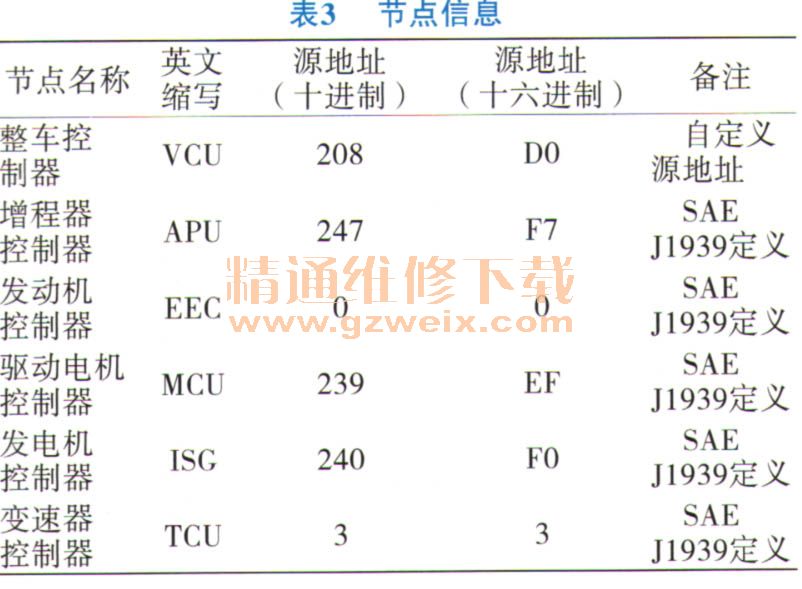
首先来整理涉及到的节点,节点详细信息见表3。
5.1串联式
串联式混合动力电动汽车信号见表4。
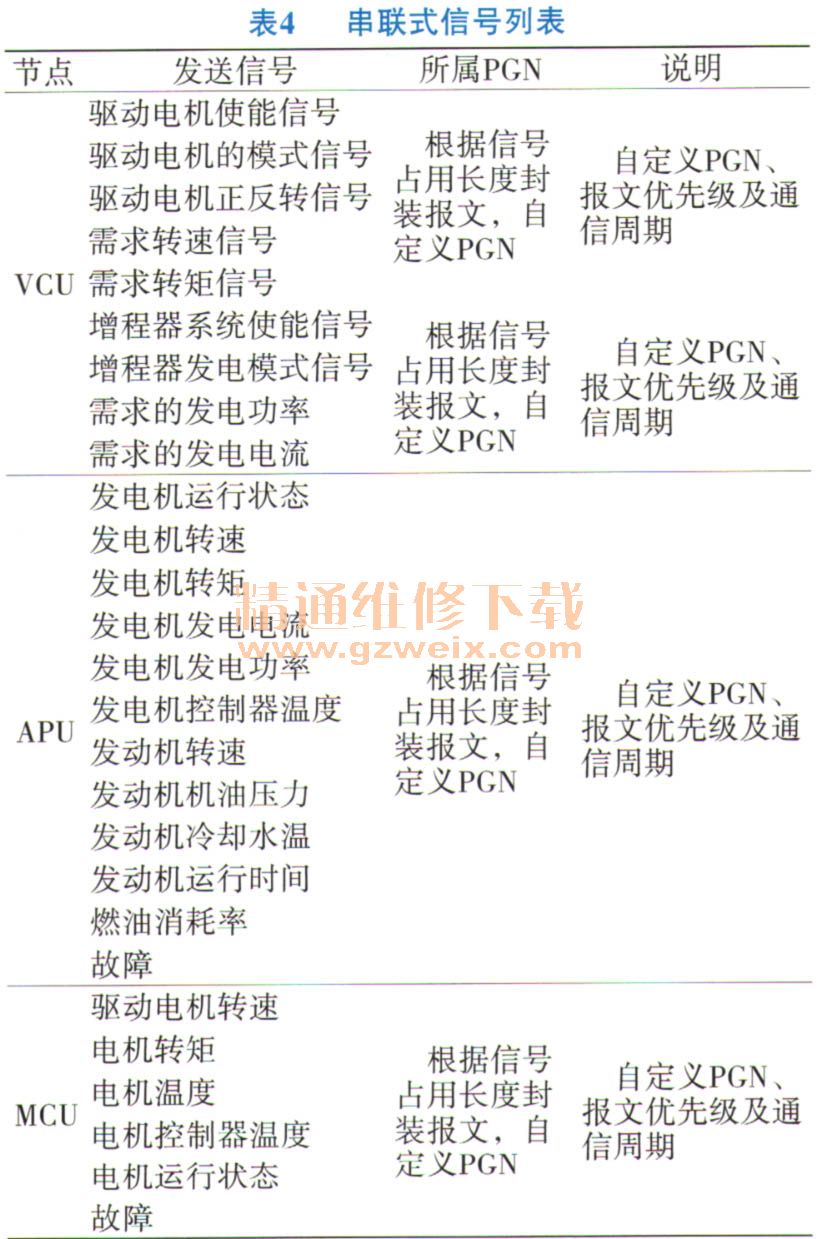
由表4可以看出,PGN都要自定义。自定义PGN要注意,应在SAE J1939的PGN预留区进行分配,并根据信号的刷新速率的要求,最终给出合理的PGN、优先级及通信周期。
5.2并联式
并联式混合动力电动汽车信号见表5。
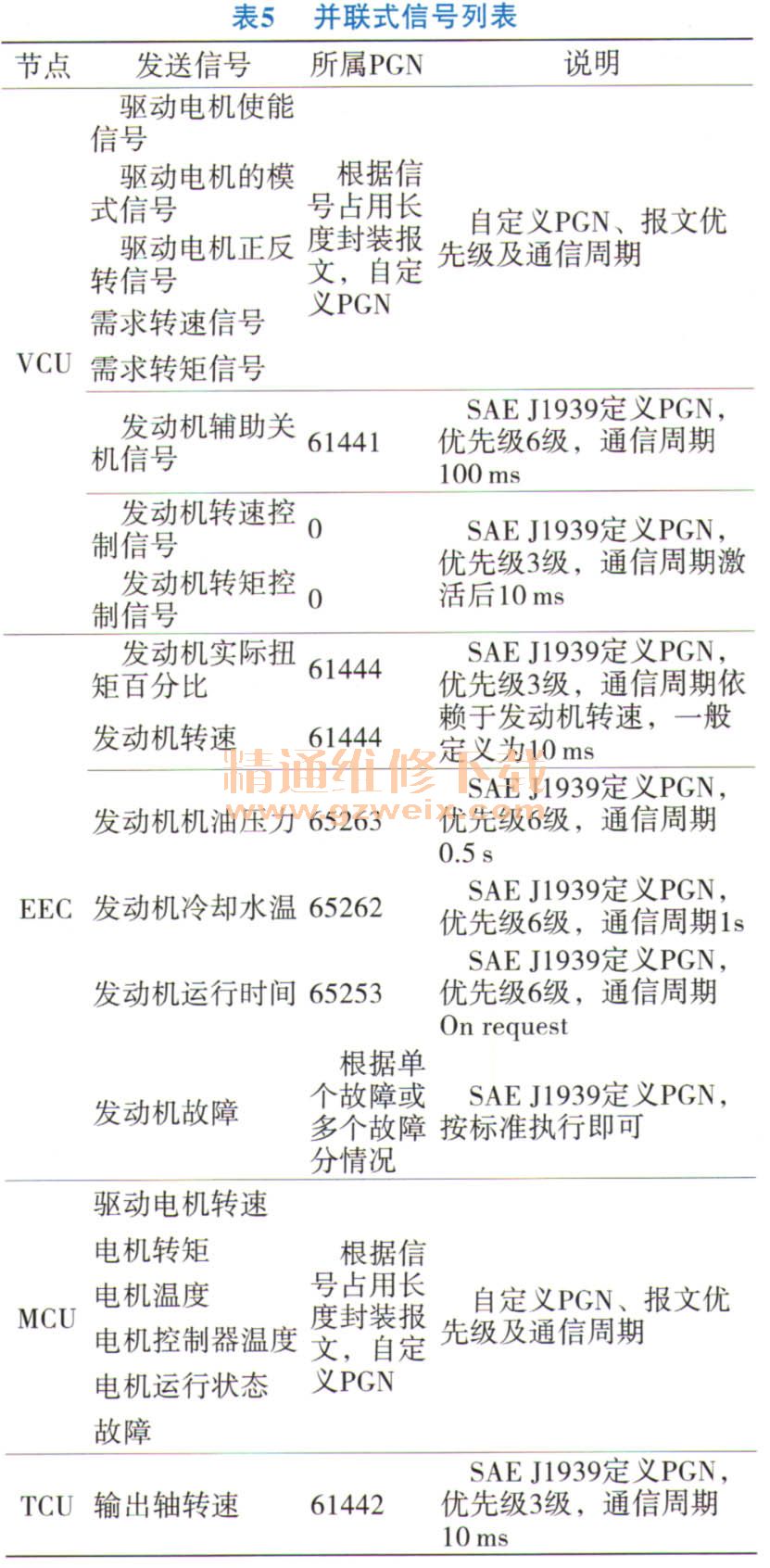
由表5可以看出,除发动机PGN,其它都要自定义。发动机PGN标准已有规定,按规定执行即可。发动机信号有一点要注意的是,发动机运行时间所在的PGN,通信周期是On request,要想获得这个报文的信息,需要发送请求PGN来请求发动机控制器发送。
6 请求PGN
SAE J1939-21数据链路层中规定了目前共支持5种类型的消息,分别为:命令、请求、广播/响应、确认和组功能少。消息的具体类型可由其分配的参数组编号(即PGN)识别。CAN数据帧数据域中的多字节参数,先存放最低字节。上述的要想获得发动机运行时间这个信号,就需要用到请求类型的消息。
请求类型的消息提供了从全局范围或从特定目标地址请求信息的能力。对特定目标地址的请求称为指向特定目标地址的请求。请求PGN的定义见表6。
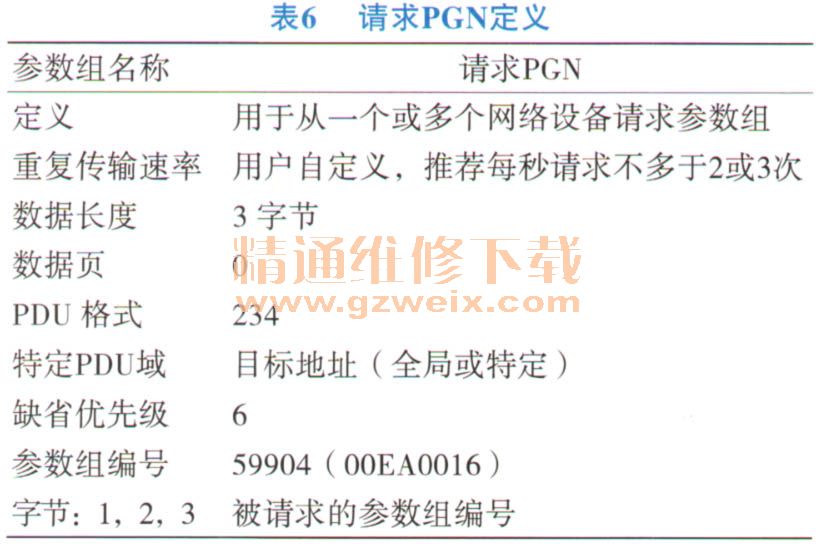
在这里,是整车控制器请求获得发动机运行时间信号,PGN为(65253)1o= (OOFEE5)16,理论上请求报文应该见表7。

表7中,标识符为18EAOODO,表示优先级6级,整车控制器(源地址DO)请求发动机控制器(源地址0)发送请求的PGN信息,理论上是可行的。但是,由于目前的发动机厂家都没有开放对源地址DO的相应信息,表7中的请求报文发动机根本无法识别。因此,需要具体情况具体对待,借用发动机开放识别源地址进行请求。例如玉柴的某款发动机可以识别的是源地址是21的请求报文,因此表7中标识符应该为18EA0021,这样才可以正确获得想要的请求信息。
在这里需要指出的一点是,串联式混合动力电动汽车中,整车如果想要知道发动机运行时间信息,则要求增程器控制器上报即可。在增程器系统的内部,由增程器控制器来发送请求报文以获得发动机运行时间信号。
7 结束语
本文主要就串联式和并联式混合动力电动汽车电气系统的设计来展开说明,并详细介绍CAN通信设计。混合动力电动汽车的整车控制是今后深入学习的一个方向,希望对有需要的人能有一定的帮助。
")
")
")
")
")
