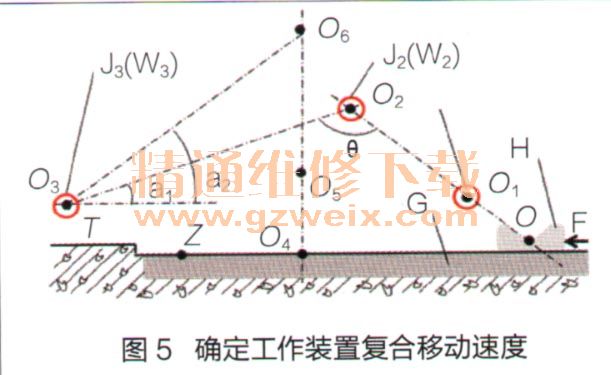
(2)确定工作装置复合移动速度
数学模型模拟工作装置运动轨迹根据挖掘机动臂缸、斗杆缸、铲斗缸直径及主泵输出液压油流量,计算出动臂缸、斗杆缸、铲斗缸活塞杆伸缩速度。再根据动臂、斗杆、铲斗相关尺寸及其运动的相应位置,计算出动臂、斗杆、铲斗各点地线速度,从而建立挖掘机工作装置运动的数学模型。通过计算机分析挖掘机平整作业时动臂缸、斗杆缸、铲斗缸活塞杆运动程序,将运动程序输入挖掘机控制器,用以控制挖掘机2台主泵的流量。
在挖掘机铲斗绞点O1、斗杆绞点O2和动臂绞点O3处,各安装1个角度传感器J1、J2和J3,利用角度传感器提供控制信号,测量工作装置的位置或姿态,通过控制器控制2台主泵的流量,时实修正操作人员操纵挖掘机平地时所产生的误差,使挖掘机能够根据数学模型对动臂、斗杆、铲斗的运动进行精确控制。如图5所示(图中虚线表示工作装置位置的变化)。
利用角度传感器测量的数据,虽然可以精确控制铲斗、斗杆、动臂缸活塞杆的位移量,但控制方法比较繁琐,而且使挖掘机销轴结构过于复杂,甚至消弱了销轴的强度,销轴在使用过程中容易发生损坏。当销轴损坏的同时,必将连带传感器的损坏。因此,虽然在销轴内安装角度传感器可以起到精确控制平整作业效果,但成本很高。
实验检测工作装置运动轨迹为了简化挖掘机平整作业控制方法,可采用实验检测方法获得控制程序。例如实验平整地面控制程序时,选择一块大于挖掘机宽度,铲斗伸出后最人长度的混凝土平地,以满足系列挖掘机实验之用;将钢板G嵌入在混凝十之上。
设计1个耐磨尼龙滑块H,其V型底部与挖掘机停机面T等高,将挖掘机斗齿尖。落入滑块v型底部,操纵挖掘机使斗齿与滑块一同从点O运动至点z,使斗齿尖在地面上直线滑动。在挖掘机平整地面时,采集动臂、斗杆、铲斗缸流量和压力数据,将这些数据用于修改控制器的控制程序。
(3)设定控制程序
根据国产挖掘机性能和配置,在挖掘机动臂、斗杆、铲斗缸上安装压力传感器,并采用成熟数据处理技术,可以比较经济的实现平整地面及斜坡的操作功能。例如:在具备正流量控制系统的挖掘机上,将实验检测工作装置平整地面运动轨迹时采集的原始数据输入控制器,与挖掘机实际平整地面作业时的检测数据进行比较,对测量数据信号实时修正,通过对阀芯开度及相应的液压泵排量等进行实时控制,即可完成动臂、斗杆、铲斗缸活塞杆速度的控制,从而实现平整地面作业的功能。
在控制器上设置平整斜坡功能,当需要平整斜坡时,将控制器设置在平整斜坡功能上,在控制器选择相应的角度,或选择一个比较接近的角度,操纵挖掘机进行斜坡平整施上,也可通过施工采集斜坡作业数据,用时实修正方法来解决平整斜坡作业问题。
目前挖掘机平整地面和斜坡的自动整平作业模式仅处于开发阶段,未来可能成为挖掘机行业转型升级、智能化施工的突破口。
上一页 [1] [2] [3]





