・上一文章:新型隧道描杆台车技术解读
・下一文章:高驱动推土机工作装置换向阀漏油故障排查及改进方法
3.锁车条件及时机
(1)锁车条件
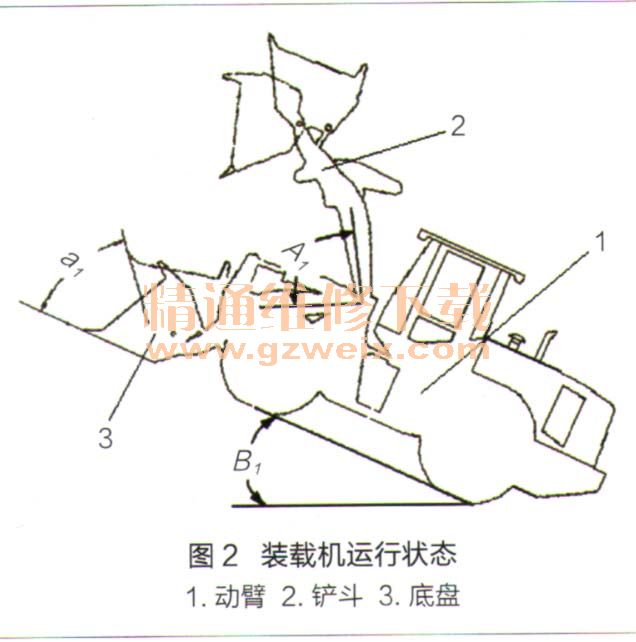
远程通信控制模块接收到远程监测中心发来锁车指令后,将该指令通过CAN总线转发给行车控制器,行车控制器收到锁车指令后,首先通过发动机转速传感器获取发动机转速情况,判断发动机是否处于转动运转状态,若发动机处于运转状态,则通过对应的传感器获取车速、动臂举升角度、铲斗翻转角度、整车倾斜角度、转向缸压力值等信息,将这些装载机运转参数与行车控制器内对应预设的数值进行比较,当发动机转速、车速、动臂举升角度A1、铲斗翻转角a1、整车倾斜角度B1、转向缸压力值全部在各自对应的预设范围以内时,判定为符合锁车工况并进入锁车程序。若上述装载机运转参数中有1个不在对应的预设范围内,则认为装载机处于作业或高速行驶状态,此时行车控制器只记录锁车控制指令及对应的锁车要求,但不执行锁车动作。若发动机处于停转状态或装载机状态符合锁车工况,行车控制器记录锁车控制指令对应的锁车要求,并按照锁车要求执行相应级别的锁车控制。装载机运行状态如图2所示,其参数值视不同型号装载机而定。
(2)锁车时机
发动机未启动时,当前装载机已处于通电状态,但发动机未启动,即发动机转速传感器检测到发动机转速为。时,行车控制器立即执行锁车指令,并记录锁车要求。
低速运转时,当前发动机转速在700~1200r/min范围内,车速小于5km/h,动臂举升角度小于30°,铲斗翻转角度在-20°~+20°,整机角度在-5°~+5°范围内,转向压力小于5MPa时,行车控制器则立即执行相应的锁车操作。若上述条件有一个不满足,说明装载机处于作业或高速行驶状态,考虑到行车安全,行车控制器不执行锁车操作,但会记录锁车控制指令对应的锁车要求,直到上述条件都满足要求时再执行锁车。





