・上一文章:解析双涡轮增压发动机控制系统
・下一文章:检修奥迪A8无法启动故障
一个由CAN 总线构成的单一网络中,理论上可以挂接无数个节点,但实际应用中,所挂接的节点数目会受到网络硬件的电气特性或延迟时间的限制。使用计算机网络进行通信的前提是,各控制单元必须使用和解读相同的“电子语言”,这种语言称“协议”。汽车电脑网络常见的传输协议有多种,为了实现与众多的控制与测试仪器之间的数据交换,就必须制定标准的通信协议。随着 CAN 在各种领域的应用和推广,1991 年 9 月 PhilipsSemiconductors 制 定 并 发 布 了 CAN技术规范(Version 2.0)。该技术包括A 和 B 两部分。2.0A 给出了 CAN 报文标准格式,而 2.0B 给出了标准的和扩展的两种格式。1993 年 11 月 ISO颁布了道路交通运输工具—数据信息交换—高速通信局域网国际标准 ISO11898,为控制局域网的标准化和规范化铺平了道路。美国的汽车工程学会SAE 2000 年提出的 J1939,成为货车和客车中控制器局域网的通用标准。
根据信号的重复率,产生的数据量和可用性(准备状态),CAN数据总线系统一般分为如下三类:
CAN驱动数据总线(高速),速率为500kbit/s。用于将驱动线束上的控制单元联成网。
CAN舒适数据总线(低速),速率为100kbit/s。用于将舒适系统中的控制单元联成网。
CAN-infotainment总线(低速),速率为100kBit/s。用于将收音机、电话和导航系统联成网。
CAN数据总线的组成与结构:
CAN系统主要包括以下部件:
CAN控制器、CAN收发器、CAN-BUS数据传输线和CAN-BUS终端电阻。
CAN-BUS上的每个控制单元中均设有一个CAN控制器和一个CAN收发器。CAN控制器主要用来接收微处理器传来的信息,对这些信息进行处理并传给CAN收发器,同时CAN控制器也接收来自CAN收发器传来的数据,对这些数据进行处理,并传给控制单元的微处理器(如图6、图7所示)。
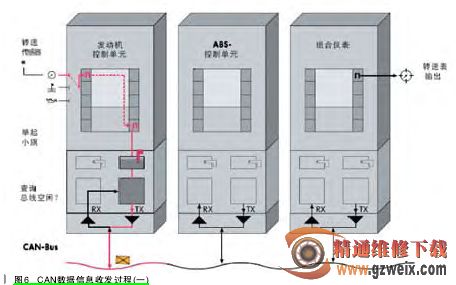
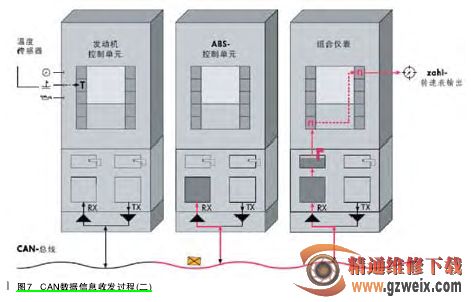
CAN收发器用来接收CAN控制器送来的数据,并将其发送到CAN数据传输总线上,同时CAN收发器也接收CAN数据总线上的数据,并将其传给CAN控制器。
")
")
")
")

