・上一文章:解析双涡轮增压发动机控制系统
・下一文章:检修奥迪A8无法启动故障
控制单元是通过收发器连接到CAN驱动总线上的,在这个收发器内有一个接收器,该接收器是安装在接收一侧的差动信号放大器。
差动信号放大器用于处理来自CAN-High 线和CAN-Low线的信号,除此以外还负责将转换后的信号传至控制单元的CAN接收区。这个转换后的信号称为差动信号放大器的输出电压。
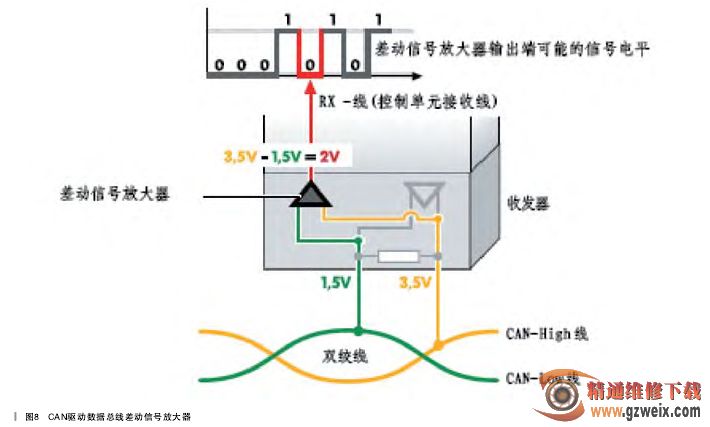
差动信号放大器用CAN-High线上的电压(UCAN-High)减去CAN-Low线上的电压(UCAN-Low),就得出了输出电压(如图8所示),用这种方法可以清除静电平(对于CAN驱动数据总线来说是2.5V)或其他任何重叠的电压。
")
")
")
")

