・上一文章:润滑系统添加剂的正确选择
・下一文章:广汽本田车型电子驻车制动(EPB)卡钳异响的处理方法
三、Intelllisafe Assist
在全新沃尔沃XC90中,Intellisafe Assist为选装件,其中包含了以下功能:主动巡航 (Adaptive Cruise Control, ACC);车道保持(Lane Keeping Aid, LKA);导航辅助 (Pilot Assist, PA);距离警告(DistanceAlert, DA);自动速度限制(Automatic Speed Limiter, ASL)。
1.主动巡航(ACC)
ACC起到定速巡航的作用,并具能够根据前方车辆速度自动调节本车速度。驾驶员能够设定的最低巡航速度为30 km/h,但是ACC可检测到前方车辆是否已完全停止,这意味着ACC能够以0~200 km/h的车速跟随另一辆车。当前车停止后,本车可保持3s的静止,之后ACC将进入待机模式,如果驾驶员在6s内按下“Resume",车辆将继续跟随前方车辆。
ACC利用ASDM内的雷达和摄像头探测前方车辆,并由雷达测定与前车的距离,雷达的工作范围为200 m(以前车型的前向雷达工作范围为150 m)。ACC可对车辆施加最大约4 m、s2的制动,对应最大制动能力的40%左右。如需施加更大制动力,则需要启用碰撞警告功能或由驾驶员执行更大力制动。
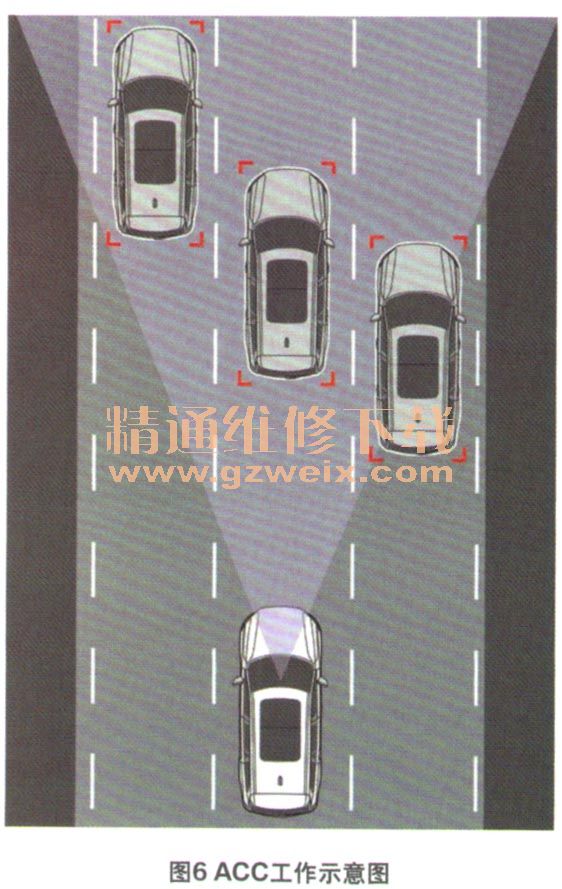
为了在超车、变道或其他车辆驶离前方车道等特定情况下实现更平顺、更具逻辑性的控制,XC90的ASDM能够同时监测邻近的多条车道,获取车速、相对速度以及距离等信息 (图6),这使WC90能够比以前车型的ACC更平顺地调节制动和加速特性。
2.车道保持(LKA)
LKA功能持续监控车辆横向加速度、转向盘转角以及来自摄像头的车道边线信息,判断车辆是否有无意中驶离车道边线的风险,并且根据实际情况分2步支持并警告驾驶员。
首先,如果系统检测到车辆即将无意驶离车道边线,会通过电子转向助力系统对转向机构施加最大3 N·m的反向扭矩,从而避免车辆驶离车道边线并引起驾驶员注意。如果该反向扭矩不足以避免车辆驶离车道边线,系统会请求继续施加阻力并发出声音警告并施加转向盘震动,进一步提醒驾驶员注意。
但是,必须明确的是,LKA永远无法接管车辆,驾驶员始终需要决定如何操控车辆。LKA工作的前提是驾驶员始终将手放在转向盘上并驾驶车辆(通过转向机构中的传感器检测),否则驾驶员将会收到主动驾驶车辆的文本信息提示,如果驾驶员未遵照提示驾驶车辆,则LKA功能将进入待机模式。在小于2.6 m宽的狭窄路面上,LKA功能将暂时中断。
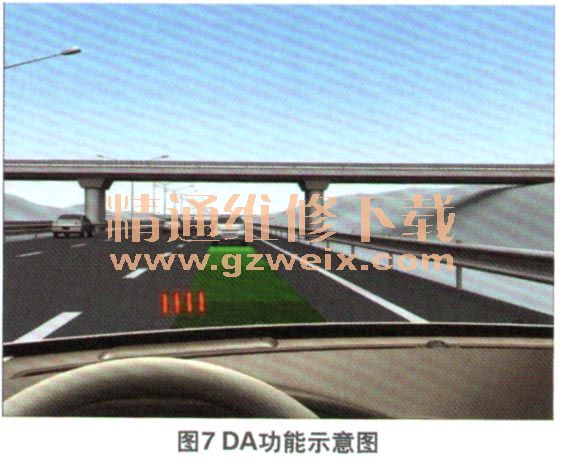
DA是一个单独功能,在自适应巡航控制关闭或者处于待机模式时,如果与前方车辆存在追尾风险,则会激活日UD中的4个橙色LED警告灯(图7)。DA功能可以按照与ACC相同的方式调节与前车的时间距离,也可设定为相同的时间间隔。
4.自动速度限制(ASL)
ASL功能通过RSI功能来探测各种限速标志,并将车辆的最大车速调整为探测到的车速。驾驶员可在CCD中开启或停用ASL功能,ASL的状态将利用仪表板上的符号指示。
5.导航辅助(PA)
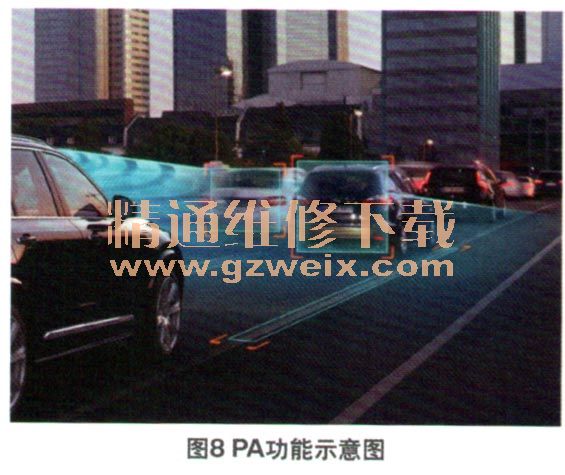
PA是ACC与LKA功能的组合,这意味着车辆除了可自动保持与前车的预设时间间隔外,还可辅助驾驶员进行转向并将车辆保持在车道的两侧边线之间(图8)。PA功能需在前方有可跟随的车辆,且车道边线清晰可见的情况下启用。PA的最大预设速度为50 km/h且不可调节,如果前车车速增至50 km/h以上,则PA关闭,ACC切换为待机模式。PA功能的转向辅助力与 LKA相比略大,这是因为PA车速较低,通常需要更大的转向辅助力。
")
")
")
")

