6.动态转向系统
A4L是第一款使用动态
转向系统的车型。这种
转向系统能够根据车速和方向盘的转角来控制转向传动比,无论是在驻车、在多弯道的乡间公路行车,还是在高速公路上高速行车,都能提供最佳转向传动比。另外,动态
转向系统能够对ESP系统提供支持,提高主动安全性。动态
转向系统如图25所示。
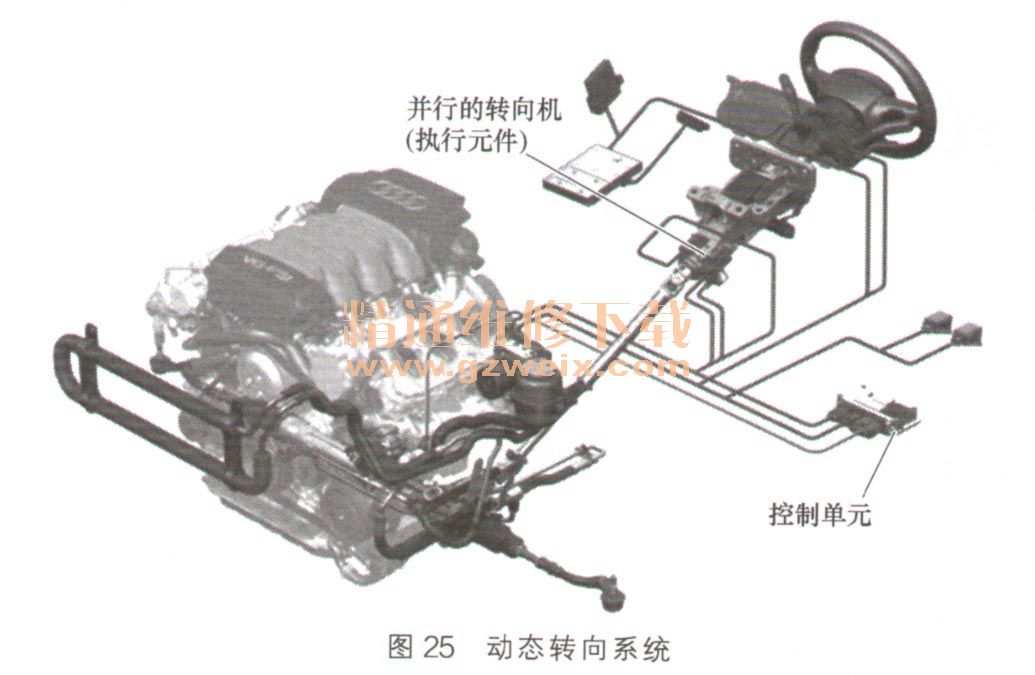
动态转向控制模块(J792)能够计算出转向角应该增大还是应该减小,然后操纵电动机并使转向机工作。动态
转向系统工作原理如图26所示。

动态转向控制模块位于驾驶员脚坑处的座椅横梁前部,其功能分为基本功能和辅助功能两部分。动态转向控制模块如图27所示。

基本功能是指系统根据计算出的转向角来调节转向传动比,相关参数包括车速和驾驶员所实施的转角,只要系统无故障,这个调节过程就一直进行。辅助功能是ESP系统介入后的稳定控制功能,动态转向控制模块对相应的校正值进行处理,通过调节转向传动比来控制车轮的转向角。
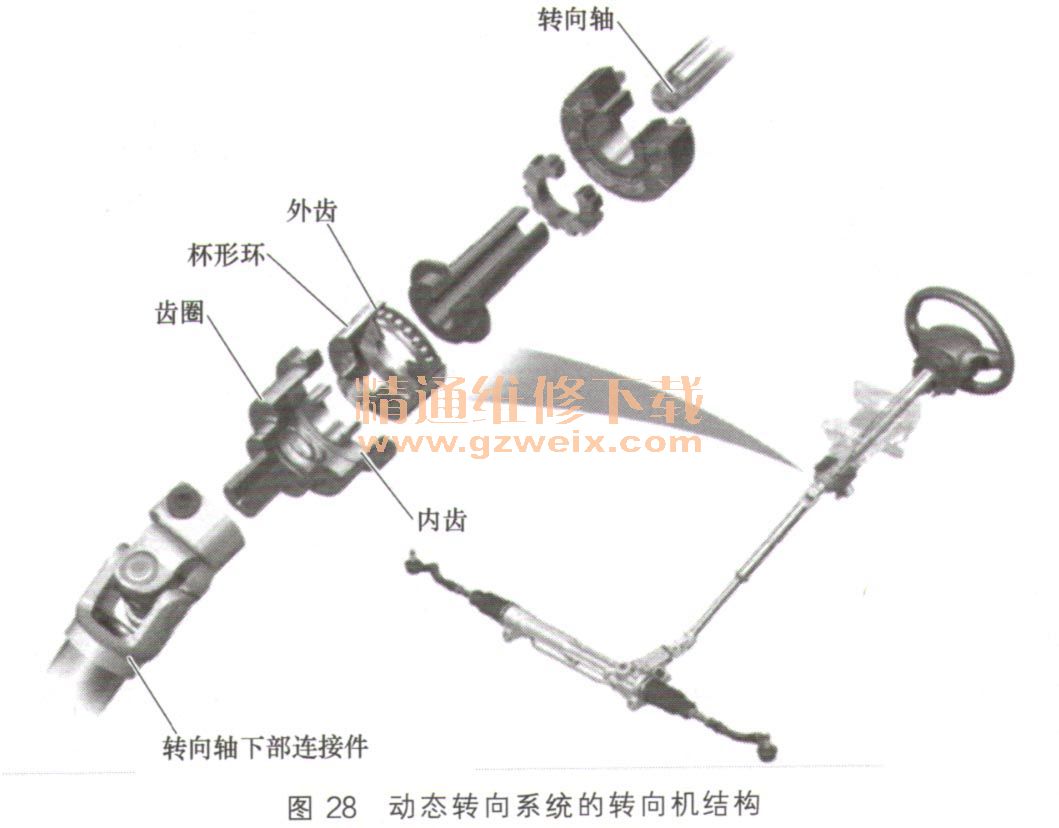
转向机是执行元件。转向角的校正是通过执行元件带动转向主动齿轮转动来实现的。这个执行元件由一个轴齿轮构成,轴齿轮用电动机来驱动。这套齿轮装置尤其适用于将较快的转动(电动机)转换成很慢的转动。动态
转向系统的转向机结构如图28所示。
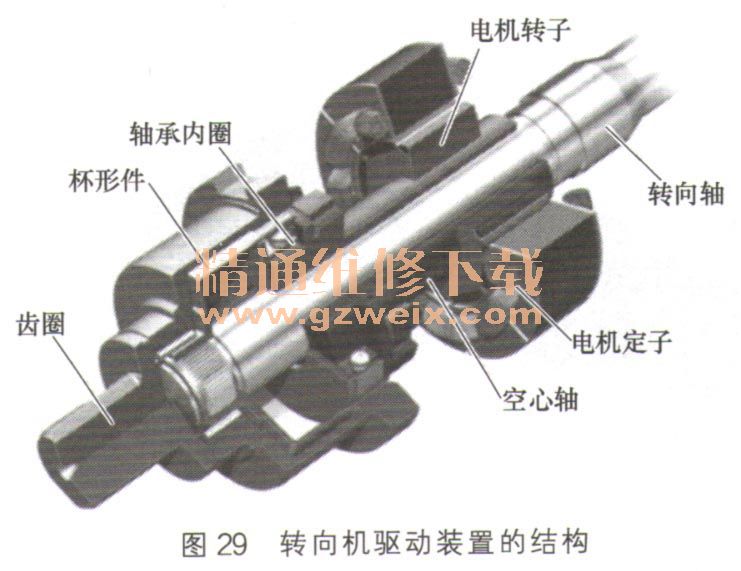
转向轴上部装有一个空心轴,该空心轴由电动机直接驱动,并且独立地在执行元件壳体内转动。转向机驱动装置的结构如图29所示。
电动机是永久激励型同步电动机,其转子与空心轴固定在一起。该转子由8个磁极可变的永久磁铁构成。定子由6个线圈构成。线圈布置在执行元件的壳体内,由动态转向控制模块控制。动态
转向系统的电动机如图30所示。

为了能在失灵时保证系统回到初始状态,可以通过机械方式将动态转向锁锁止。在正常工作状态下,只要关闭发动机,这个锁就锁止。启动发动机后,动态
转向系统开锁,此时可听到开锁的声音。动态转向锁的结构如图31所示。
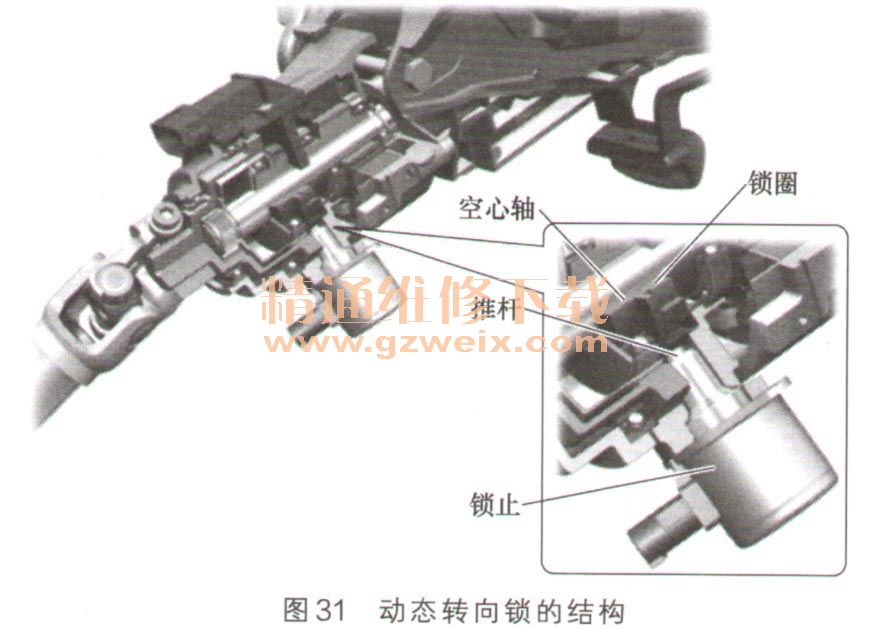
动态转向控制模块通过单独的导线激活电磁线圈,使推杆在弹簧力的作用下向电磁线圈方向运动,于是推杆脱离缺口,动态转向机构就松开了。
空心轴的位置和轴承的离心状态由电动机位置传感器进行测量。该传感器是空心轴上的磁圈,它由8个电极组成,其磁场由一个传感器来感知,这个传感器带有3个霍尔传感器。电动机位置传感器如图32所示。
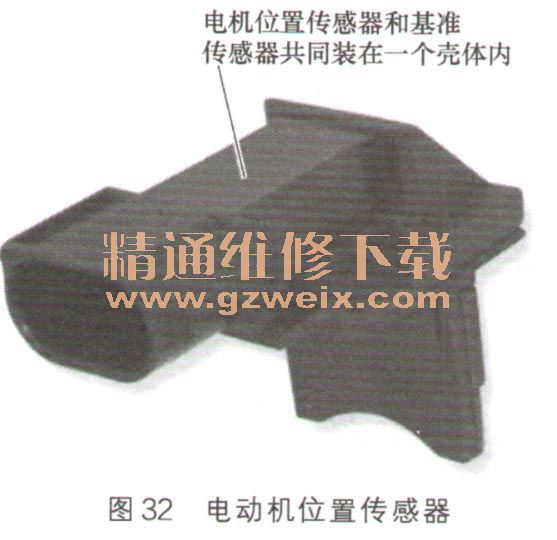
动态转向控制模块通过单独的导线接收电动机位置传感器的信号。当关闭点火开关后,当前的电动机位置信息被储存下来。若30号电源断电,则需要通过对基准传感器进行初始化来识别零位。
基准传感器和电动机位置传感器共同装在一个壳体内。输出侧齿圈外面的一个缺口用于基准传感器。该缺口在基准传感器的霍尔传感器上产生一个矩形信号。基准传感器的缺口如图33所示。

动态
转向系统的车辆装有两个ESP传感器(G419和G536)。这两个传感器装在驾驶员座椅下方,其功能和结构是相同的,传递的都是相同的偏摆率和横向加速度信号。从外表看,这两个传感器的区别在于插头的不同,如图34所示。

双传感器的设计形式是为防止误操作,这种误操作有可能是传感器信号引起的,因此两个传感器信号采用同一条信号曲线进行校验。两个传感器通过CAN总线与ESP控制模块和动态转向控制模块相连。
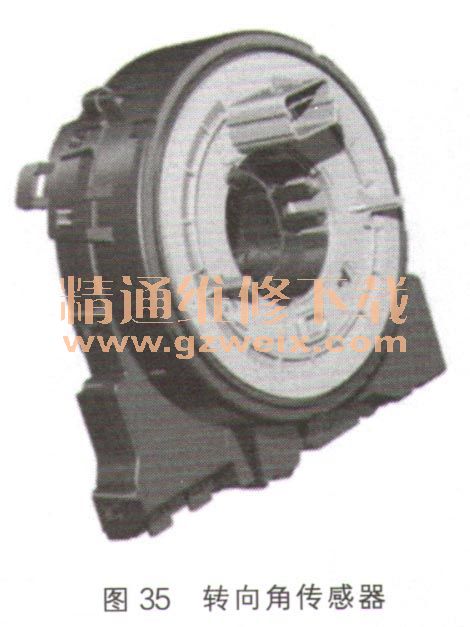
转向角信号是必不可少的信号。
转向角传感器(G85)的信号被传送到CAN总线上,由ESP控制模块和动态转向控制模块读取。
转向角传感器如图3-35所示。
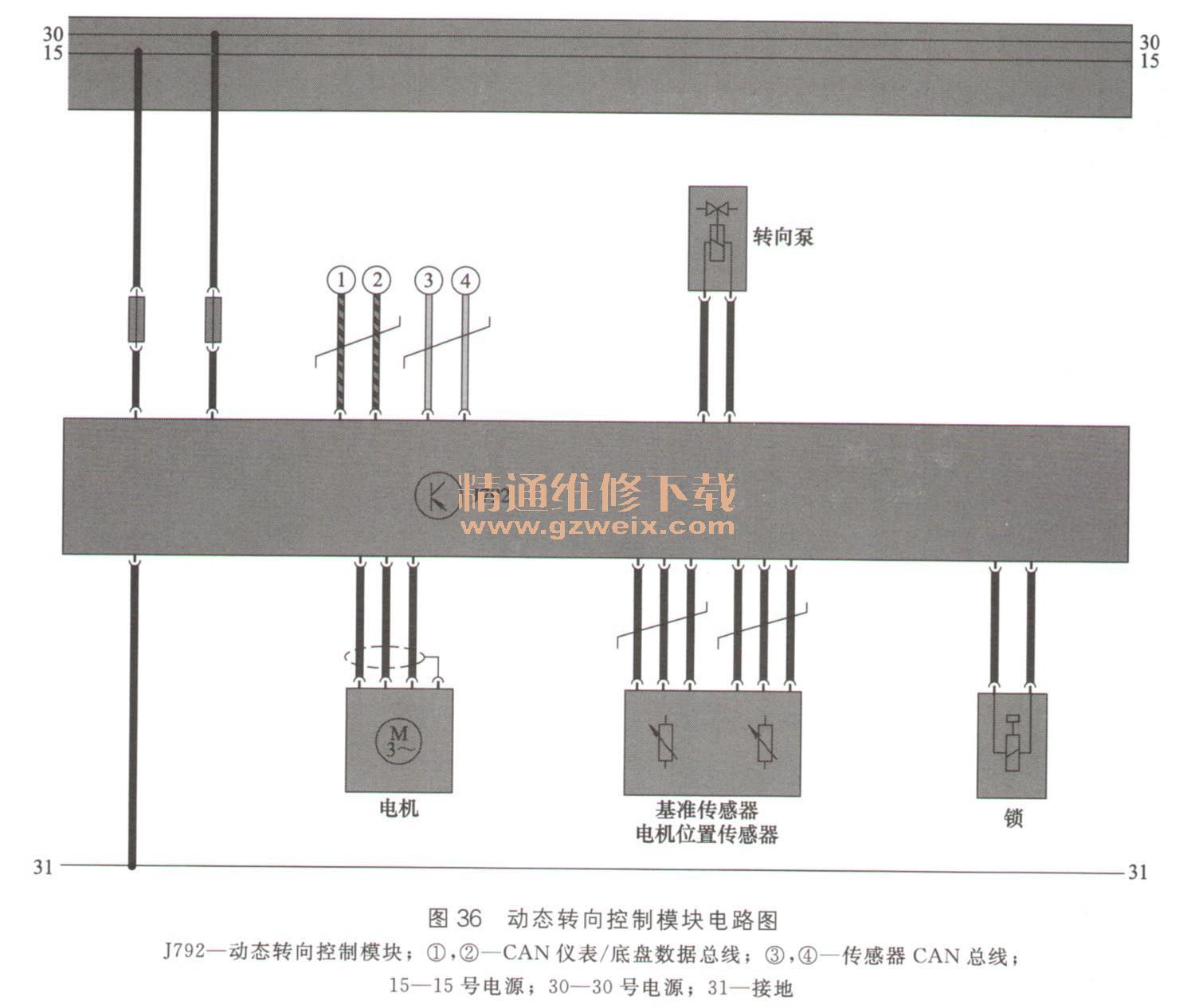
动态转向控制模块电路图如图36所示。
上一页 [1] [2] [3] [4] 下一页
")
")
")
")

