・上一文章:详解电动汽车电池管理系统技术
・下一文章:剖析宝马车系电子高度控制系统技术
三、下列其他控制单元为垂直动态管理提供信号
1. ICM(一体式底盘管理系统)
一体式底盘管理系统(ICM)接手了垂直动态管理系统的以下功能:纵向,横向加速度和偏航角速率的集中信号验证;行驶速度,路面纵向和路面横向倾斜度的集中信号处理;底盘调节系统检查控制信息显示的集中协调。
2. DSC(动态稳定控制系统)
DSC控制单元通过FleXRay将制动压力提供给VDMC)
3. SZL(转向柱开关中心)
SZL在FleXRay上向VDM提供转向角传感器信号(预先识别转向)。
4. DME或DDE(数字式发动机电子伺控系统或数字式柴油机电子伺控系统)
发动机控制系统提供发动机运转信号,此信号在FleXRay上传递。
四、系统功能
1.功能联网
为了实现垂直动态管理,需要一个复杂系统网络与分散在其他控制单元中的功能。图4显示系统网络。
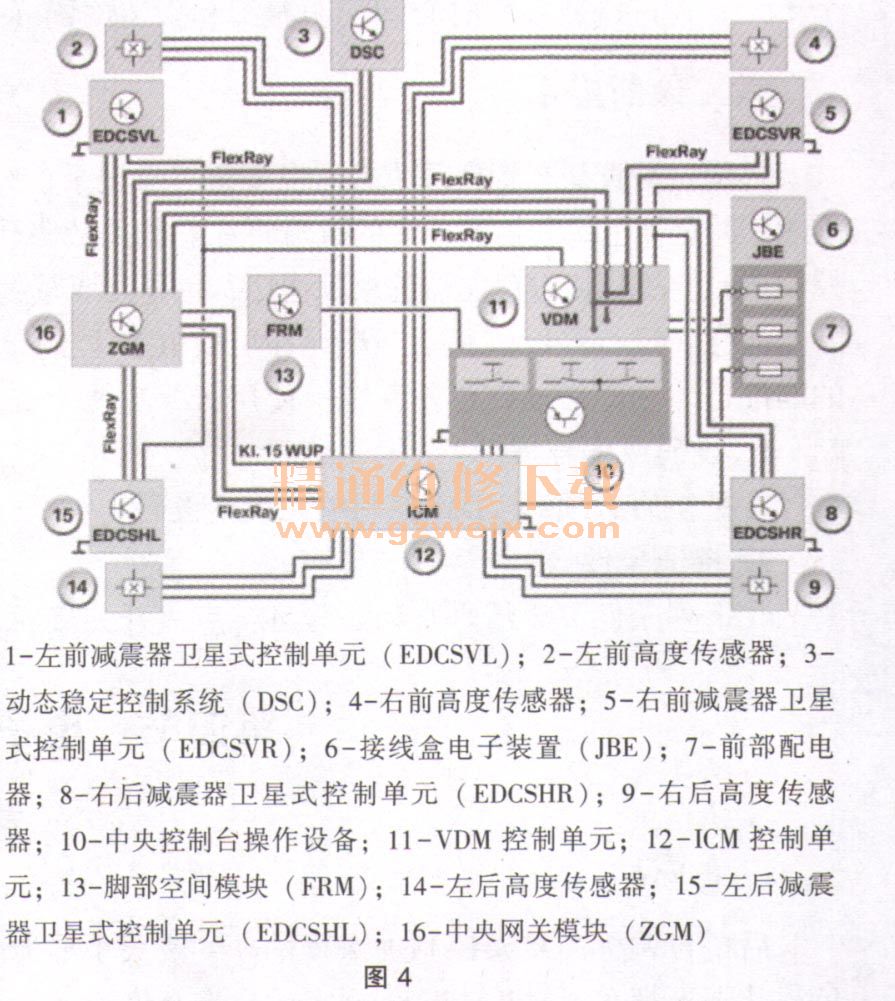
对于下一代一体式底盘管理系统(ICM),中央控制台操作面板只连接在ICM上。注意诊断系统中的电路图。
2.车轮运动以及车身运动的阻尼
为了减轻车轮运动和车身运动而监控车辆的运动。这时使用下列轴线:汽车竖轴线、汽车横轴线、汽车纵轴线。
例如使用下列信号进行监控:车辆高度和车轮加速度、转向角和行驶速度、横向和纵向加速度。
根据这些信号可计算出当前的行驶状况。对于车辆垂直轴线,减震控制已划分为舒适性和安全性。这样垂直动态管理将对车体运动的舒适性上提供保证。垂直动态管理系统对车轮加速度提供安全性保证。同时必须确保车轮不会失去与路面的接触。必须根据情况传递最佳的垂直力。垂直动态管理也考虑最大转向角(例如直线行驶到弯道的过渡)。在识别到转向角迅速增大时,VDM控制单元推断出一个正在开始的转向。因此已经能够预先相应地控制减震器。垂直动态管理由此支持主动式侧翻稳定装置(ARS)。因此VDM有助于减小车辆的侧倾。垂直动态管理也识别制动以及加速过程。对此DSC提供关于制动压力和纵向加速度的信号。较大的制动力通常会导致车辆的俯仰颠簸运动。VDM通过将前部减震器调整得更硬抵消这种俯仰颠簸运动。这样也能抵消加速时车辆的侧印颠簸运动。
根据所选的减震特性(动态行驶开关),可通过VDM控制单元匹配阻尼力的大小。与此无关,在紧急行驶状况下尽管选择了舒适模式程序,仍具有最大的行驶安全性。
3.故障保护(FailSafe)
根据存在的故障的类型,故障保护分3挡起作用:
第I挡:替代值。当例如转向角传感器信号不可用时,将使用其他参数作为转向识别的替代值。驾驶员接收不到检查控制信息:无故障代码存储记录。
第2挡:恒定电流。VDM控制单元规定一个恒定的、全部4个车轮相同的阻尼力(中等硬度的阻尼)。减震器卫星式控制单元为EDC阀门设定一个恒定电流。一个损坏的高度传感器例如可以是触发源。驾驶员接收到一条检查控制信息。在故障代码存储器中输人一个故障。
第3挡:无电流。当EDC阀门的控制中存在故障时:VDM控制单元用信号通知减震器卫星式控制单元,不允许再给EDC阀门通电。于是阀门移动到一个对应于中等至硬阻尼的位置。驾驶员接收到一条检查控制信息。在故障代码存储器中输人一个故障。
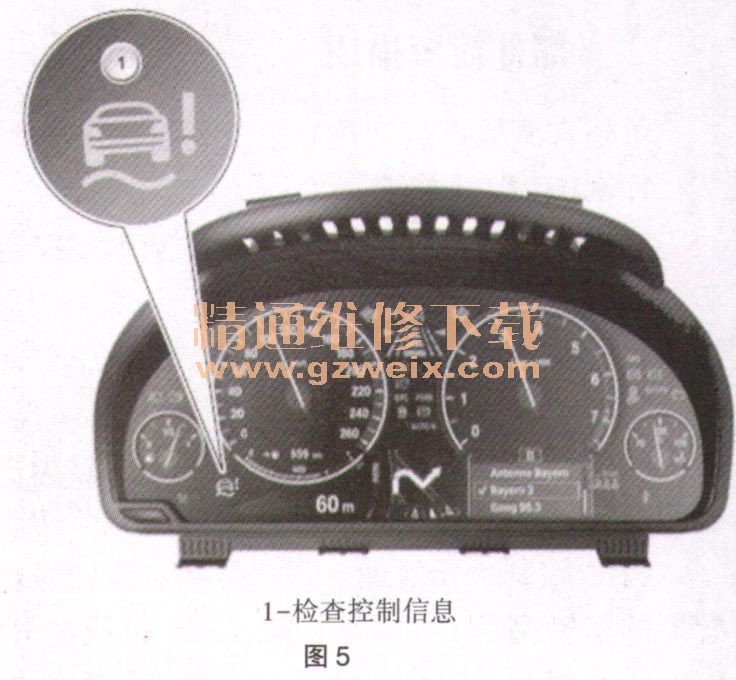
具体见图5。
")
")
")
")

