・上一文章:图说4K智能液晶彩电MSD6A918-T8E型主板维修(下)
・下一文章:关于技工汽车维修技能教学改革研究
摘要:本文对路线固定的纯电动客车,使用CAN记录仪采集其驾驶员驾驶习惯及整车运行状态;采用matlab对驾驶员驾驶行为进行分析,根据分析结果约束驾驶员驾驶行为,优化能耗结果,达到节能目的。
纯电动汽车相比传统燃油车辆,具有更强的动力性、环境友好性和能量利用率。目前纯电动汽车已成城市发展主流,很多城市公交逐渐使用纯电动汽车代替原有的燃油汽车。相比于一般纯电动汽车驾驶状态,纯电动公交在路线上更具有规律性,驾驶员行为更具有特色性,通过对驾驶员行为进行采集分析优化,可以进一步提升城市纯电动公交的能量利用率。
1 数据采集
本文选用某公司纯电动客车(图1)作为研究对象。该客车作为该公司班车,路线固定,具有研究代表性。该客车部分性能参数为:①整车参数:整备质量13870kg,最大总质量18000kg;②永磁同步电机参数:额定电压537VDC,额定转速2000r/min,额定功率120kW,额定转矩573Nm,峰值转速4000r/min,峰值功率180kW,峰值转矩1400Nm ;③变速器参数:2挡。

试验采集仪器为德国Vector公司的GL1000-CAN-LIN记录仪(图2),能够读取整车VCU里的参数,采样频率为20ms。只需提前设置好读取参数,连接至整车CAN通信即可在行驶过程中自动存储记录整车行驶信息,并被matlab等分析软件读取。
试验车辆自江苏省南京市滨江开发区出发,经过3个班车停靠点,到达南京建邺区,最后沿绕城高速返回滨江开发区。行驶公里数约为78km,行驶路况涵盖了城郊路况、城市路况、高速路况。
2 数据分析
对采集的数据进行分析,将GL 1000数据导入至CANape软件中,导出mat文件,利用matlab软件进行数据分析处理,导入的数据如图3所示。

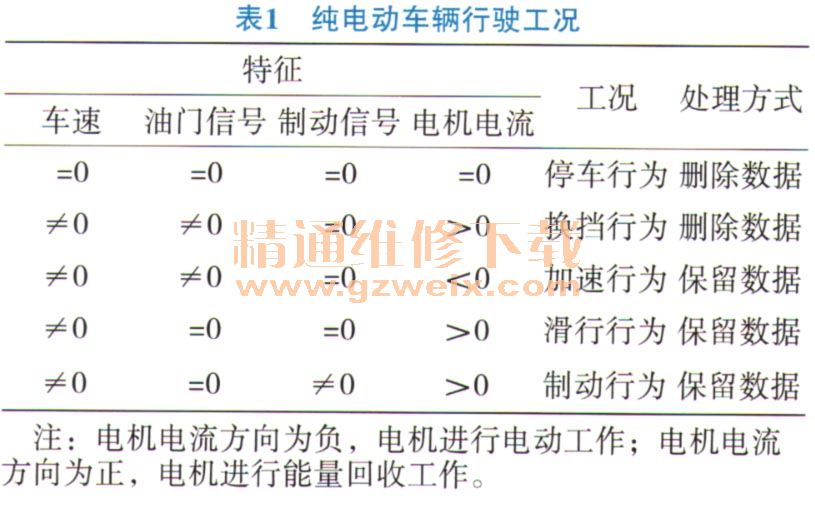
综合采集的数据来看,为了方便研究及分析,本文以纯电动汽车行驶速度为横向判定指标,在此基础上对采集数据进行筛选,选取合适的数据进行分析,在此基础上根据驾驶员不同车速下的操作信息,进行数据分类。
根据纯电动汽车控制策略和驾驶员对油门踏板和制动踏板的操作,确定纯电动汽车行驶工况对数据进行分类处理,见表1。