(1)串联制动
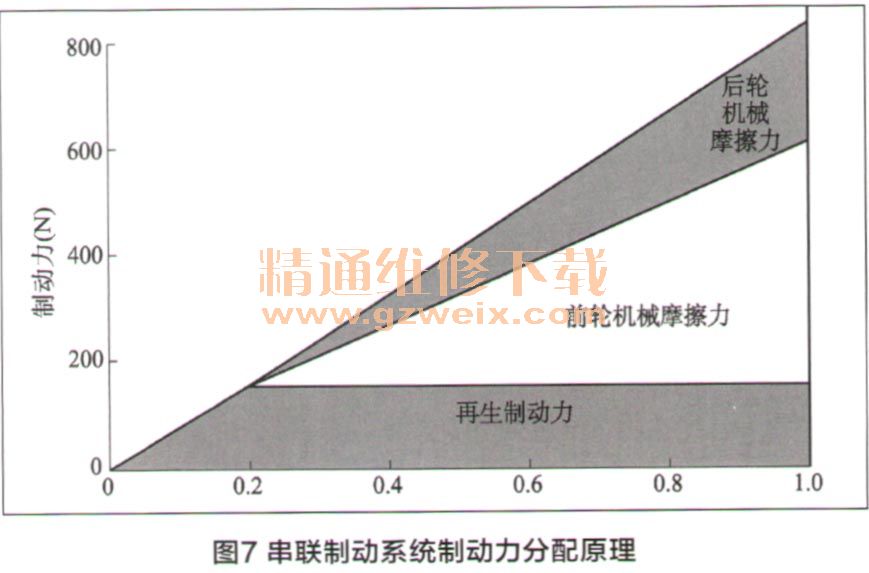
串联制动的原理如图7所示,串联制动的特点是当馈能制动力达到其最大值时,机械摩擦制动系统才参与工作,以满足车辆的制动需求。串联制动需要与车辆的
ABS集成控制,它能够对单个车轮的液压制动力进行单独调整,并可以保证使用馈能制动与路面附着(滑移率)所能容许的最大极限,很显然,由于充分利用了馈能制动,因此串联制动将获得最大的能量回收率,但与此用时,串联制动结构复杂、成本高,需要集成的控制系统。
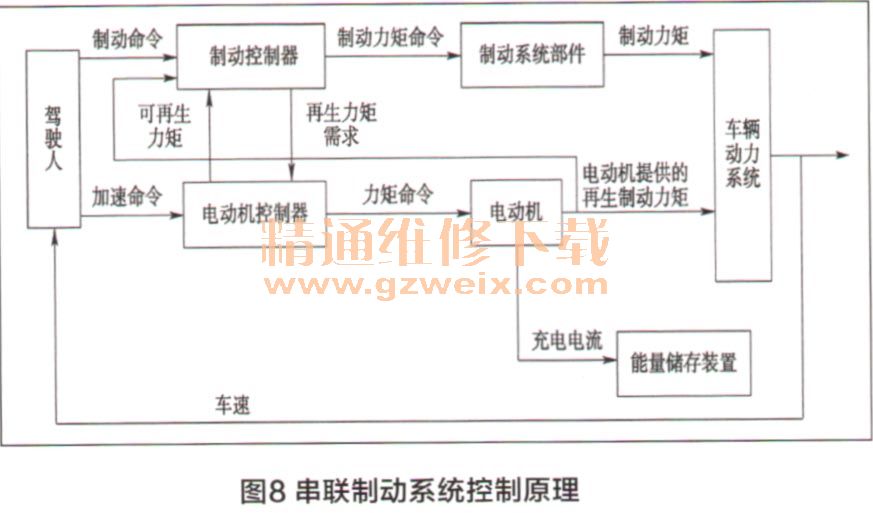
串联制动系统的控制过程如图8所示。为保持车辆的稳定制动而要求前后轮制动力平衡,根据驾驶人的制动命令,制动控制器分别计算需要由电动机和液压制动系统提供的制动力,并给液压制动系统和电动机控制器发出指令,电动机能够提供的制动转矩是电动机转速的函数,该转矩反馈回制动控制器,如果没有达到需求的制动力矩,则需要由液压制动系统予以弥补,由此可见,在串联制动中,通过电动机制动和液压制动之间的协调控制,可以最大化地利用电动机的制动转矩,其能量回收率高。
(2)并联制动
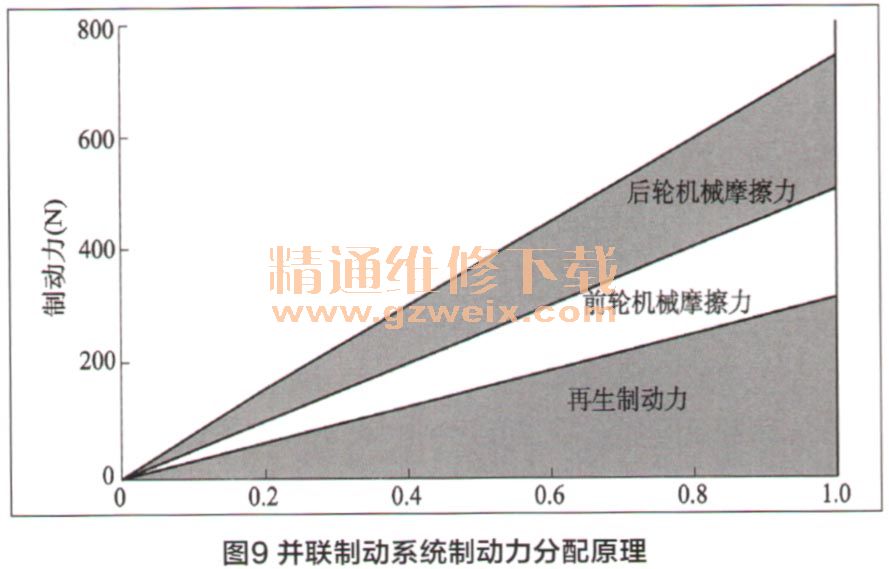
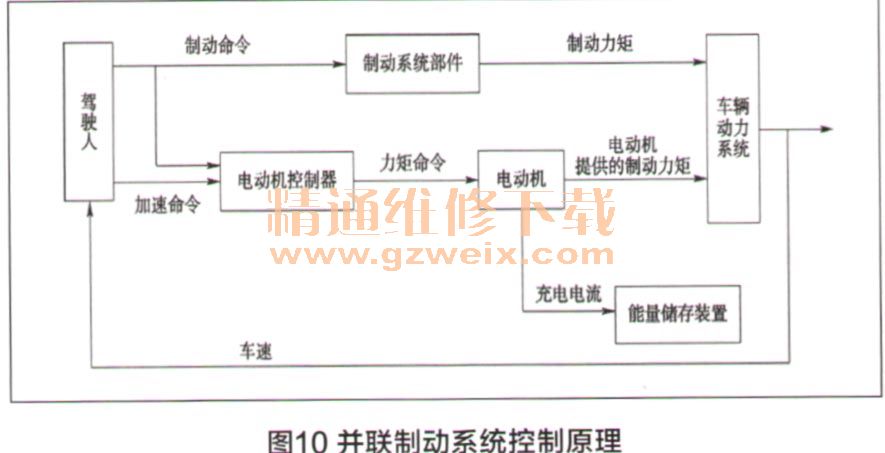
并联制动的原理如图9所示,与串联制动不同,并联制动是按一个固定的比例分配馈能制动力和机械摩擦制动力,由于没有充分发挥馈能制动力的作用,因此其回收的能量没有串联制动高,但并联制动对传统机械摩擦制动系统的改动少,结构简单,只需增加一些控制功能即可,成本低。并联制动系统的控制原理如图10所示,根据驾驶人的命令,电动机控制器确定需要加在液压制动基础上的电动机制动转矩,其大小由液压主缸压力确定,同样,电动机制动转矩是电动机转速的函数,因此能够加在液压制动基础上的电动机制动力要根据汽车的静态制动力分配关系、电动机转矩特性、驾驶人的感觉和轮胎与路面附着极限综合确定,很明显,由于缺乏主动制动控制功能,在电动机制动和液压制动系统之间不能进行协调控制,因此并联制动对电动机制动转矩使用不充分,能量回收率低。
上一页 [1] [2] [3]
")
")
")
")
")
