6.驱动电机控制----IGBT的结构及控制
在前面文章中,我提到过
新能源汽车的三大电,电机控制是其中之一,由于动力电池输出的是直流电,而电机控制需要的是交流电,因此电机控制器需要对直流电进行交流转换,这就涉及到逆变电路的控制及工作,针对这些变换的概念给大家梳理一下,方便大家理解。
(1)交流一直流变换(AC/DC变换):整流;
(2)直流一交流变换(DC/AC变换):逆变;
(3)直流一直流变换(DC/DC变换):斩波;
(4)交流一交流变换(AC/AC变换):变频;
交流一直流一交流变换(AC/DC/AC变换)。
可知,直流变交流称为逆变过程,关于逆变的详细工作原理有兴趣的读者可以看相关电子电工学的资料文献,但本文还是需要提一下IGBT的控制,也就是
新能源汽车电机控制器主要用到的逆变电路。
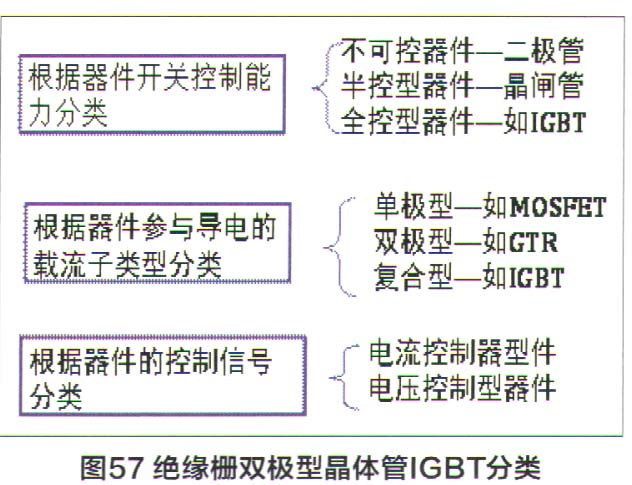
新能源驱动电机控制器采用三相两电平电压源型逆变器,又称智能功率模块,以IGBT(绝缘栅双极型晶体管)模块(图56)为核心,辅以驱动集成电路、主控集成电路。对所有的输入信号进行处理,并将驱动电机控制系统运行状态的信息通过CAN2.0网络发送给整车控制器。图57所示为绝缘栅双极型晶体管IGBT分类。
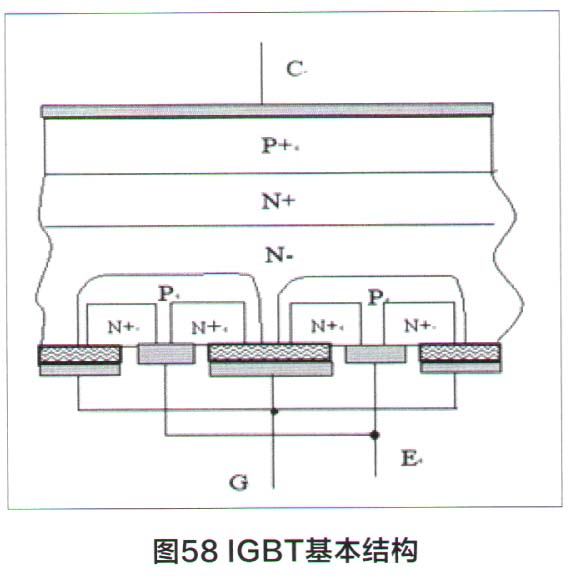
绝缘栅双极晶体管的结构如图58所示,116用IGBT的集电极电流最大可做到3 600A,集射极电压可达到4 500V以上,中小容量IGBT的开关工作频率在20~40kHz,大容量IGBT的开关工作频率通常在5kHz左右,IGBT是目前应用最为广泛的电力电子器件,使用功率范围从几百瓦到数百干瓦。
7.驱动电机控制—位置控制
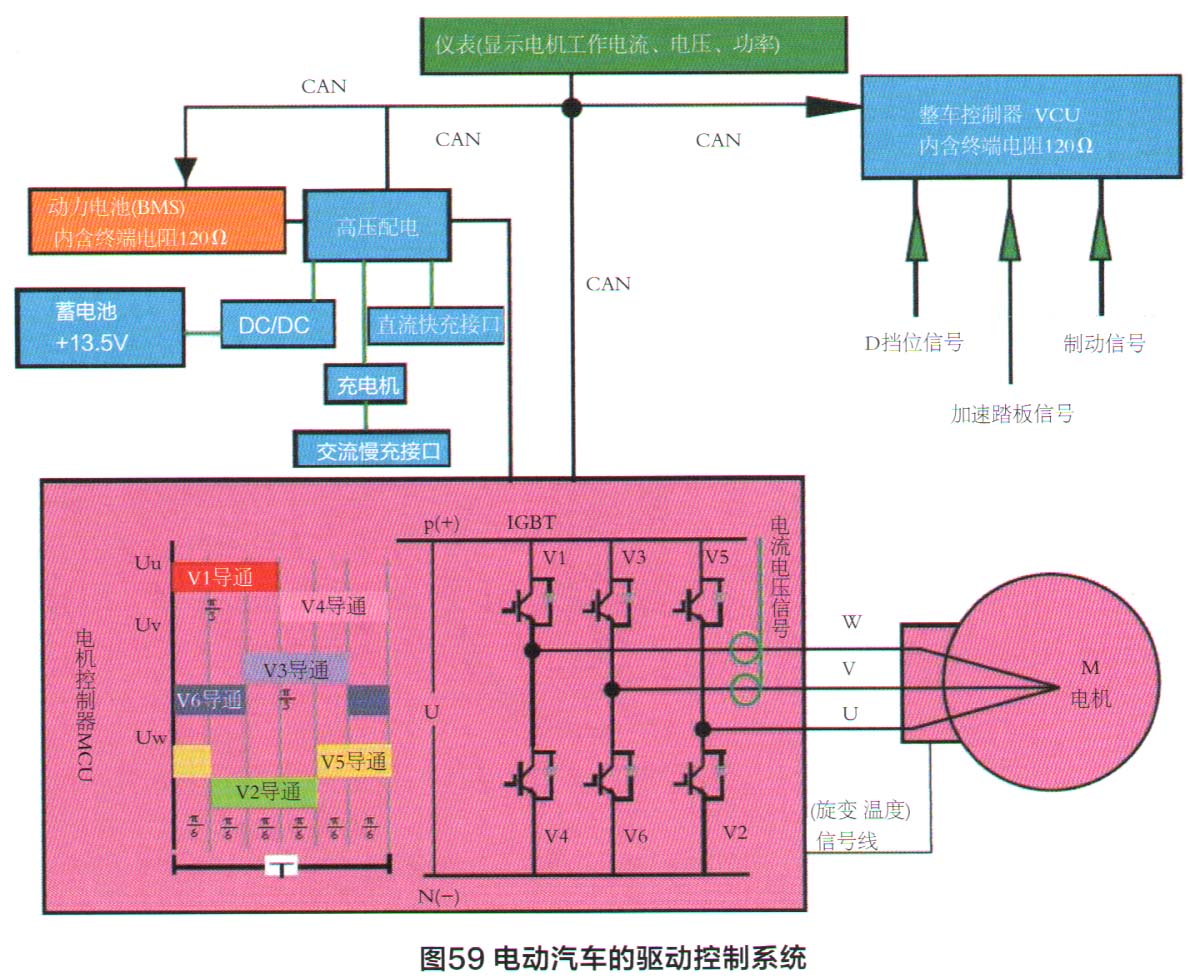
位置传感器将转子的位置信号电平反馈给控制芯片,控制芯片经过电流采样和数学变换,并根据反馈的位置信息经过闭环运算,重新按新的PWM占空比输出,来触发功率器件。图59所示为
电动汽车的驱动控制系统原理图。
驱动时:整车控制器根据车辆运行的不同情况,包括车速、挡位、踏板开合程度和电池SOC值来决定电机输出转矩/功率。
当电机控制器从整车控制器处得到转矩输出命令时,将动力电池提供的直流电转化成三相正弦交流电,驱动电机输出转矩,通过减速箱来驱动车辆运行。
动力电池提供直流电,经高压分配器到电机控制器,电机控制器中的逆变器将直流电转换为电压频率可调的三相交流电,供给驱动电机,驱动电机将电能变为动能输出转矩驱动车轮运行。
再生制动(能量回馈)时:当车辆在溜车或刹车制动的时候,电机控制器从整车控制器得到发电命令后,电机控制器将电机置于发电状态。此时电机会将车子动能转化成电能。然后,三相正弦交流电通过电机控制器转化为直流电,存储到电池中。
电机永磁转子磁场的轴线超前于定子旋转磁场的轴线一定角度,转子拖着定子旋转磁场转,电磁吸力方向发生变化,即与旋转方向相反起制动作用,同时电机做发电机运行,把动能变成电能产生三相交流电,逆变器处于整流工作状态,将三相交流电变为直流电,经高压分配器反馈回
蓄电池。既节约了电能又减少了制动片的磨耗。
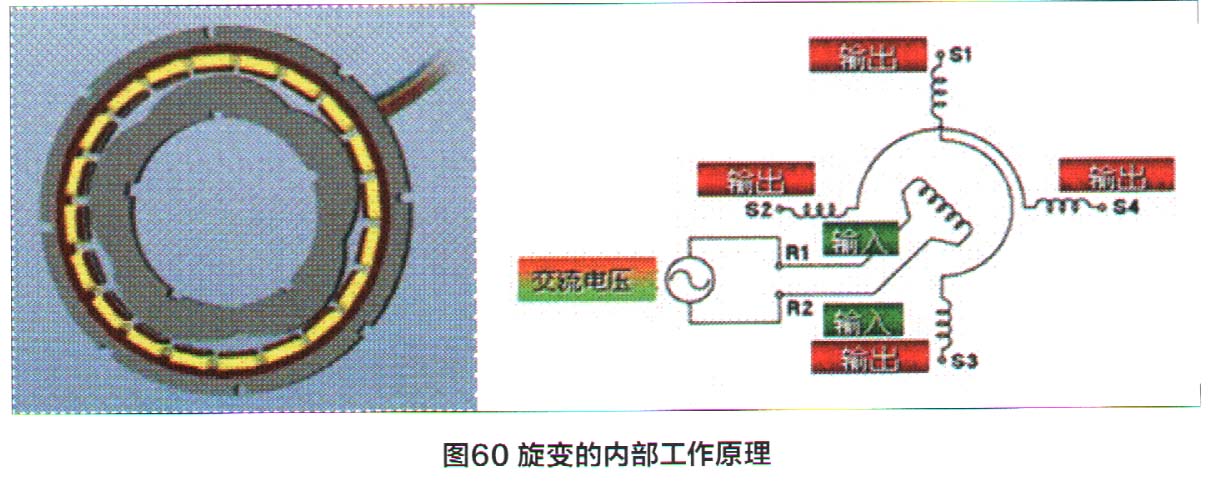
(1)旋转变压器
旋转变压器简称旋变,是一种输出电压随转子转角变化的信号元件。当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正余弦函数关系。图60为旋变的内部工作原理示意图。
(2)解角传感器
为了满足电机静止启动和全转速范围内转矩波动的控制目的,需要利用解角传感器精确地测量永磁转子磁极位置和速度。解角传感器是采用
电磁感应原理制成的旋转型感应传感器,它由定子和转子组成。椭圆型转子与电机永磁转子相连接,同步转动。椭圆型转子外圆曲线代表着永磁转子磁极位置。定子包括1个励磁线圈和2个检测线圈,2个检测线圈S和C轴线在空间坐标上正交,MCU按预定频率的交流电流输入励磁线圈A,随着椭圆型转子的旋转,转子和定子间的间隙发生变化,就会在检测线圈S和C上感应出相位差90°正弦、余弦感应电流,MCU根据检测线圈S和C感应电流的波形相位和幅值,以及波形的脉冲次数,计算出电机永磁转子的磁极位置和转速值信号,作为MCU对电机矢量控制的基础信号。
[1] [2] [3] [4] 下一页
关键词:

")
")
")
")
")
