发动机本身具有一定的负扭矩/负功率吸收能力,例如发动机进排气阻力、机械摩擦、发动机附件(水泵、机油泵、发电机、风扇、增压器等)的功率损失产生的阻力,卷扬变量泵、卷扬马达内泄及消耗效率。由于这些负功率、内泄及消耗效率的不确定性,难以精确计算,且在消耗这些负扭矩时,会使发动机转速在一定程度上提高。
如果负载造成的负扭矩不大,发动机转速提高后可以自己稳定在另一个转速值,这种状态下对发动机并无伤害,且还具有节油功能,系统可不予调节。但当吊载较重,超出发动机本身的吸收能力,使发动机升速超过额定的最高转速,则会对发动机造成损害。发动机不足以“钳制”负载,便会出现发动机“飞车”和负载失控等现象。一旦发生这种现象,可对发动机造成永久损坏,还可造成负载急速着地。此时不仅可使被吊的物体报废,而且会使履带起重机防后倾系统承受瞬时的反冲力,造成履带起重机失稳的重大安全事故。
(2)控制方法
对闭式
液压系统控制的最终目的是保证卷扬马达或重物能够快速、可控地达到稳定运行状态,且在这种状态时发动机和卷扬马达转速在合理范围内。
因控制过程并非处于平稳状态,若等到发动机升速至最大允许转速再进行干预则很难实现。且发动机转速被拖动升至最大值、负载却仍在加速下落时,无论调节卷扬马达还是调节卷扬变量泵,都会对系统造成冲击。
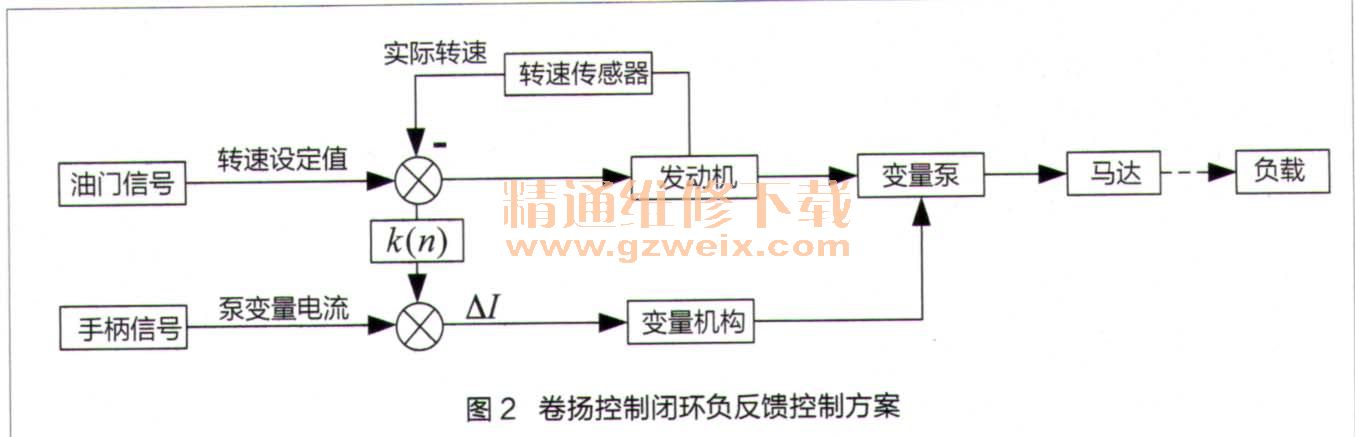
为使负载下落时的速度得到控制,我们结合发动机、卷扬变量泵控制器的输入、输出特性,设计了闭环负反馈控制方案,如图2所示。该方案以发动机实际测量转速作为反馈值,将其与油门设定的转速值比较,然后根据差值修正手柄控制的卷扬变量泵的排量。
根据实际测试效果,当发动机实际转速超过油门设定转速200r/min以上时,立即降低控制器输出至卷扬变量泵变量电流值,以降低卷扬变量泵的排量,直至发动机转速平稳降下。
虽然用误差积分调节算法能减少系统超调量,但这会降低系统的响应速度。因起升系统对发动机转速的稳态误差没有严格限制,所以控制器的调节采用比例控制算法,不需引入误差的积分调节算法,比例控制算法可满足使用要求。
(3)测试
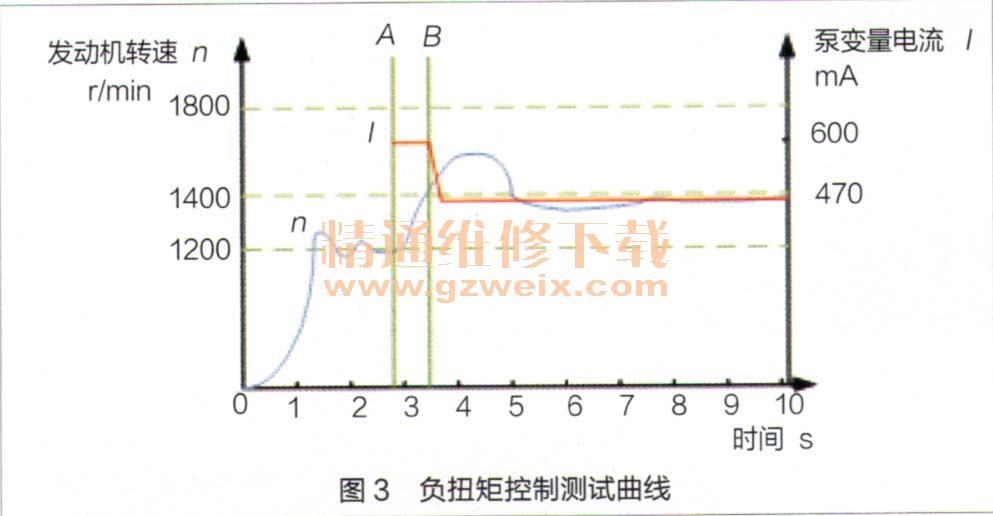
我们对比例控制算法的控制器进行了测试,测试结果如图3所示。0~3s (A线)对应时间是扳动手柄后控制器输出至卷扬变量泵电流值(此时卷扬马达制动器已打开,重物开始下落),3.5s之后(B线)对应时间是检测到发动机失速200r/min后控制器降低卷扬变量泵电流值。从图中可以看到,当卷扬变量泵电流值降至470mA时,发动机转速逐渐减小到1400r/min以内,从而抑制了发动机持续失速的趋势,验证了“降低卷扬变量泵排量能够减小负扭矩”的理论依据。
上一页 [1] [2] [3] [4] 下一页





