地下控制测量
地下平面控制测量洞内施工控制导线由联系井测量的井下起始边为支导线的起始边,沿隧道设计方向布设施上导线点。施工控制导线的平均边长选择在150m左右,尽量按等边直伸导线布设,导线点观测台由钢板焊接而成,采用强制对中装置,利用螺栓固定在管片侧壁上,并在旁边标示点位号及挂警示保护牌,方便保护点位,并根据时间间隔及掘进长度及时复测这些导线点,检查是否移位。
地下高程控制测量盾构机进洞掘进后,将高程引至洞内控制导线点上作为高程控制点与平面控制点共用,测量时需要满足二等水准测量的技术要求。作为施工导线用的吊篮高程可由洞内控制水准点用水准测量方法进行引测传递。地下控制水准测量应在隧道贯通前独立进行3次,并与地面向地下传递高程同步。
盾构机测量
盾构机始发前的测量准备盾构机导轨测量主要控制导轨的中线与设计隧道中线偏差不能超限,导轨的前后高程与设计高程不能超限,导轨下面是否坚实平整等。它的位置主要是利用地下导线点分别在导轨的前后两端放样出隧道中线上的中心点,利用这2个中心点来控制导轨的平面位置。利用水准仪通过地下水准点测定始发托架的高程,根据测量结果进行调整,使托架的三维坐标测设值与设计值较差应小于3mm。
盾构机组装前测量对盾构机推进线路数据进行复核计算,实测出发、始发井预留洞门中心横向和垂直向的偏差。
盾构机组装后测量盾构机组装完成后,在盾构机右上方留出位置安装测量标志,并保证测量通视。盾构机始发时高于设计线路2cm。盾构机就位后精确测定相对于盾构机推进时设计轴线的初始位置和姿态。安装在盾构机内的专用测量设备就位后立即进行测量,测量成果应与盾构机的初始位置和姿态相符,并报监理工程师备查。
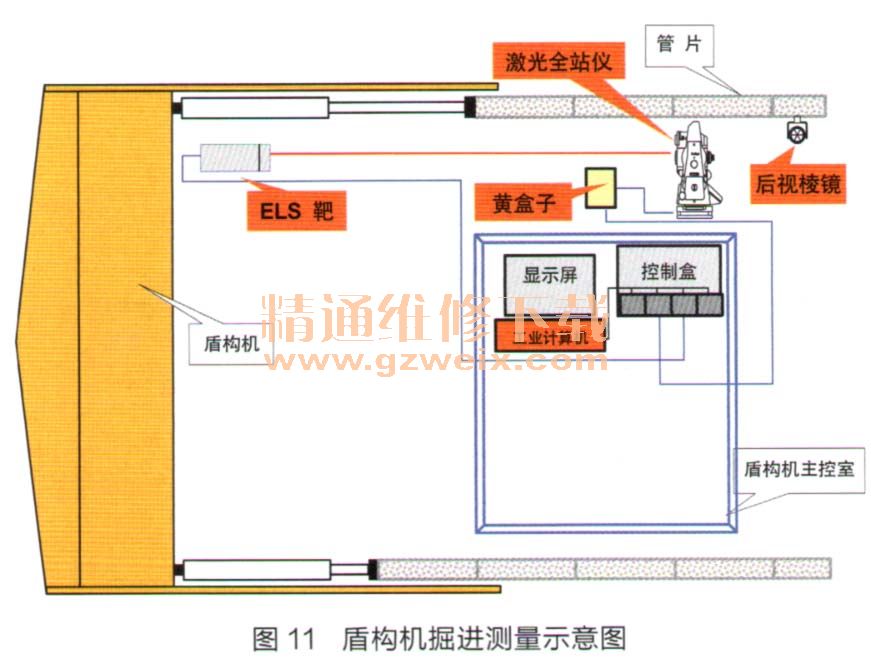
盾构机掘进中测量盾构机推进测量以SLS-T导向系统为主辅以人工测量校核,SLS-T导向系统是盾构机自备的导向系统,由德国VMT GmbH公司研制。能全天候的动态测量盾构机的里程、掘进趋势、盾构机的旋转角、水平倾角、俯仰角、盾构机偏离隧道设计中心线的位置、管片的位置、管片的选择安装、盾尾净空等,SLS-T导向系统所显示的盾构机姿态是盾构机日常掘进的基准,主司机可根据显示的偏差及时调整盾构机的掘进姿态。该系统主要组成部分有ELS靶、激光全站仪、后视棱镜、工业计算机等,见图11。
SLS-T导向系统能够全天候的动态显示盾构机当前位置相对于隧道设计轴线的位置偏差,盾构机主司机可根据显示的偏差及时调整盾构机的掘进姿态,使得盾构机能够沿着正确的方向掘进。
辅助测量和复测盾构机推进实时姿态测量包括其与线路中线的平面偏离、高程偏离、纵向坡度、横向旋转和切口里程的测量。应用井下导线成果实测并计算出盾构机的前标、后标的坐标(并进行转角改正),再算出切口和盾尾的坐标与设计坐标进行比较后计算出切口和盾尾的平面偏离值。测出前标中心的竖直角及距离计算出前标的高程,再以盾构机的纵坡计算出切口、盾尾的高程,经与设计高程比较后,计算出切口和盾尾的高程偏离值。每推进一环后,以观测报表的形式提供以上数据。视施工需要也可在推进前和推进过程中增加观测报表次数。
托架测量在盾构机的配置中,用于掘进方向控制的主要为导向系统(SLS-T)来控制,在盾构机右上方管片处安装拖架,拖架用钢板制作,其底部加工强制对中螺栓孔,用以安放全站仪。详见图12。

强制对中点的二维坐标必须预先测量通过洞口的导线起始边传递而来,角度测量采用止倒镜观测四测回的方法;距离观测时每条边均往返观测,各测两测回,并进行气象改正和仪器加乘常数改正;高程测量采用单程双置镜法。
托架采用膨胀螺栓在管片上固定,因为是装在管片上的,管片在安装以后可能会随着时间、注浆情况、地质情况以及其他各种因素的影响,管片一会发生不同情况的位移、沉降,拖架坐标、高程就会发生变化,超出一定值,导向系统所显示的姿态就会是一个假值,进一步就会影响到上程的质量,因此在搬站次数达2次或2次以上、在SLS-T导向系统VMT显示的姿态在掘进过程中突然发生变化,并在短时间内不能回到初始值、或者在施工中托架受到施上人员或者物体的碰撞。因此在这些情况下需对托架上的强制对中点坐标与隧道内地下控制导线点坐标相互检核。如较值过大,需再次复核后,确认无误后以地下控制导线测得的三维坐标为准。因此盾构机在推进过程中,测量人员要牢牢掌握盾构机推进方向,让盾构机沿着设计中心轴线推进。
上一页 [1] [2] [3] 下一页





