・上一文章:大众途锐发动机故障灯亮
・下一文章:奥迪轿车技术通报九则
一辆行驶里程约11.2万km的2008年宝马X5SUV。用户反映:该车辆行驶中仪表和中央信息显示屏突然变成黑屏,DSC故障报警灯、4 x4报警灯、发动机故障报警灯、手制动报警灯点亮报警。
故障诊断:接车后首先通过ISID进行诊断测试。读取故障内容如下:
D2 C4-CA:K-CAN线路故障;
E6 C4-RFK; K-CAN线路故障;
E5 C4-CID:K-CAN线路故障;
D6 C4-AMPHK ; K-CAN线路故障;
E2C4-CON:K-CAN线路故障;
D8 C4-HUD:K-CAN线路故障;
E2 C7-CON: K-CAN通信故障。
对于总线故障,ISTA系统有相应的说明。如下:在CAN总线控制单元中可能有两个不同的总线故障记录:
◇ CAN通信故障
◇CAN线路故障
通信故障概括得说加了CAN总线上损坏的、不能再进行通信控制单元。只有当故障目前不存在,才可以读取故障"CAN通信故障”。如果当前存在故障,则不能再与控制单元通信,因此也不能读取故障代码存储。
导线物理故障可以通过使用容错CAN收发器识别,但是目前只有用于K-CAN数据总线的容错收发器,因此仅连接在K-CAN数据总线上的控制单元会有故障代码存储记录“CAN线路故障”,此外CAN收发器无法区分各个故障类型。如果总线故障“CAN线路故障”记录在一个控制单元中,则表明:
◇ CAN(高速)断路
" CAN(低速)断路
◇CAN(高速)对地或正极短路
◇CAN(低速)对地或正极短路
◇CAN(高速)对CAN(低速)短路
在每个控制单元中都有各自的一个总线端。这意味着,一旦断路,电平可能在整个K-CAN网络上保持。这会导致发送控制单元不能识别该故障,并继续在双线模式下工作。但如果控制单元越过中断位传送一条信息,则接收控制单元仅在未损坏的总线导线上确定活性。接收控制单元将由此识别出单线运行状态,并存储下故障“CAN线路故障”。如果不同的控制单元通过接收到除中段位以外的信息,则会有多个控制单元在单线运行状态下输入该故障代码存储内容。
查看故障内容细节描述,故障频率5次,故障内容当前存在。从故障内容来看,多个故障码表现为K-CAN线路故障,分析来看极有可能就是总线的线路有故障。选择故障内容执行检测计划,ISTA亲统分析CAN总线上通信故障可能是下列原因:
◇ CAN Low(低速)或CAN High(高速)通信线断路或者短路
◇插头连接损坏(触头损坏、污垢、锈蚀)
◇车用电源系统中的故障电压(例如由损坏的点火线圈或接地连接引起)
◇某个控制单元中的通信部件故障
◇某个控制单元的供电故障(当蓄电池电量快耗尽时蓄电池电压缓慢下降可能导致故障记录存储,因为不是所有的控制单元由于电压下降而同时关闭)
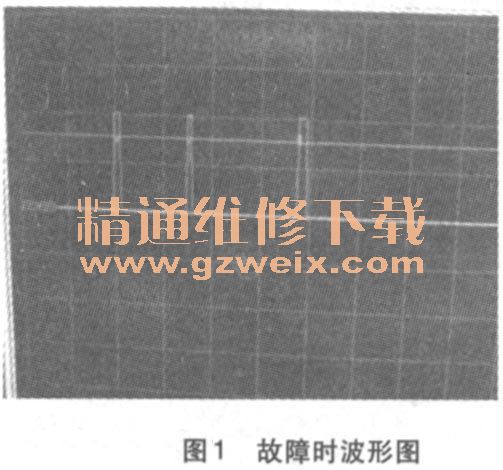
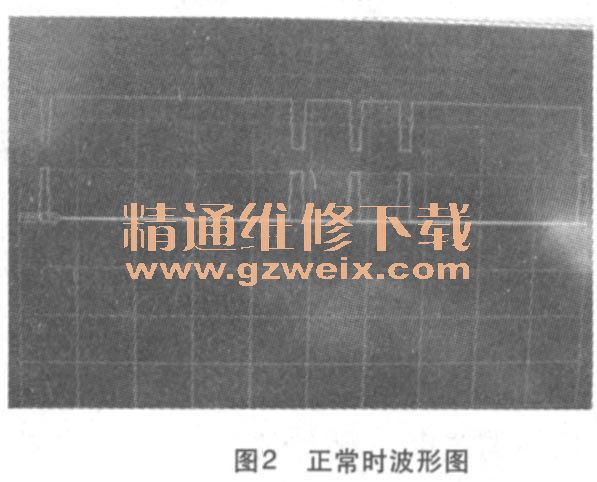
为了弄清CAN总线是否完好工作,监测总线上的通信情况十分有用,这就需要测量总线的波形。连接INIIB,测量K-CAN总线通信波形,如图1所示。通过波形发现K-CAN-Low呈一条直线状态,明显不对。通过电压测量,K-CAN-Low电压为1. 5V左右,正常CAN-Low(低速)对地:电压大约4.8V; CAN High(高速)对地:电压大约0. 2V,正常的K-CAN波形应该如图2所示,这就说明了K-CAN-Low有可能对地短路。
如果在系统中存在短路,则所有,K-CAN控制单元必定记录了故障“CAN线路故障”。为了查找短路,应进行下列工作步骤:
◇将CAN总线用户一个一个依次拔出,直至找到故障原因(=控制单元x)
◇检查控制单元x导线是否短路
◇如有必要检测控制单元x
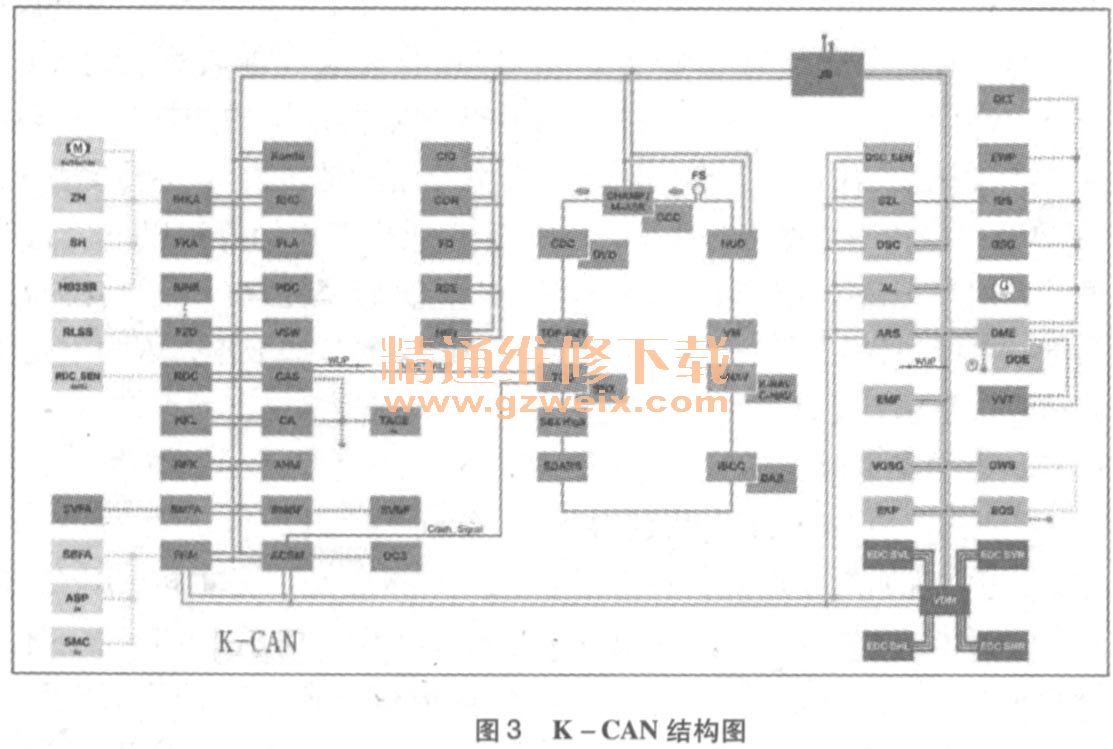
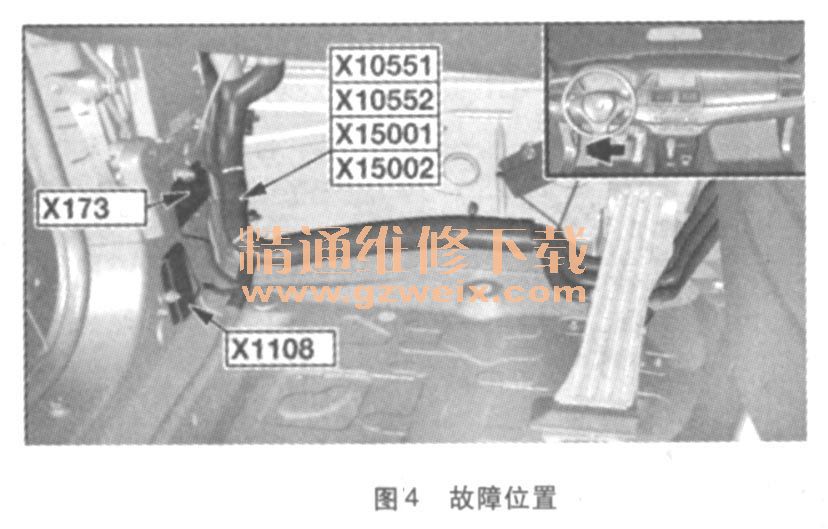
根据K-CAN结构图,如图3所示。依次断开K-CAN上的控制单元,K-CAN-Low线路故障仍然存在,这就说明了不是控制单元引起的故障。接下来根据节点法,依次断开节点检查K-CAN线路,当断开节点X15002时,如图4所示,发现波形图中的K-CAN-Low波形恢复了正常。K-CAN节点X15002的线束连接到仪表台中的线束,就说明了通往X15002线束有故障,查询车辆的维修记录发现车辆曾经因为事故维修拆卸过仪表台,拆下仪表台检查K-CAN节点X15002连接的线束,结果发现仪表台骨架把一段线束挤压破皮和车身直接短路,对照确认刚好有K-CAN-Low线束,分析可能是拆卸安装仪表台后没有按照规定固定线束引起。
修复损坏的线束,删除故障存储,故障排除。





