・上一文章:大众帕萨特领驭轿车EPC及警
・下一文章:摩托车LED前照灯与白炽丝光源前照灯性能对比试验研究
一辆行驶里程约10.2万km的2010年丰田RAV4运动型多功能车(车型为ACA33L-ANPGKC,搭载2.4 L 2AZ-FE发动机)。用户反映:车辆转向沉重。
故障诊断:接车后,维修技师首先确认故障现象,发现在发动机运行状态下,仪表盘上的P/S转向助力)警告灯、安全气囊警告灯、ABS(防抱死制动)警告灯、驻车制动警告灯均点亮。连接丰田故障检测GTS,发现GTS无法与车辆建立通信。根据上述故障现象的特点,维修技师怀疑该车CAN通信总线存在短路故障。为了验证判断是否正确,断开蓄电池负极电缆,用万用表测量DLC3(OBD-“诊断连接器)的端子6(CANH)和端子14(CANL)之间的电阻,为0Ω,而维修手册提示CAN通信总线CANH与CANL之间的标准电阻应为54Ω~69Ω,电阻值小于54Ω说明CAN总线CANH与CANL之间存在短路。于是决定测量CAN通信总线的波形进行验证,连接好蓄电池负极电缆,把双通道示波器正极表棒分别连接DLC3诊断连接器的端子6(CANH)和端子14(CANL)上,负极表棒搭铁,起动发动机,示波器显示的CAN通信总线故障波形如图1a所示(正常波形如图1b所示),由此可以确认CAN通信总线CANH与CANL之间的确存在短路故障。但要找到具体的短路故障点,还要根据该车CAN通信总线系统的组成特点,对主、分支链路进行测量。该车CAN通信总线系统采用双绞线组成一条主通信链路和一条分支路链路(图2)。在主、分支路链路上连接着车辆动力控制系统和安全控制系统的ECU和传感器(节点)及CAN通信总线与其他通信总线进行数据信息交换的车身ECU(网关),并且在主通信总线上串联有120Ω的终端电阻;主、分支总线的通信速率达到500Kbps。


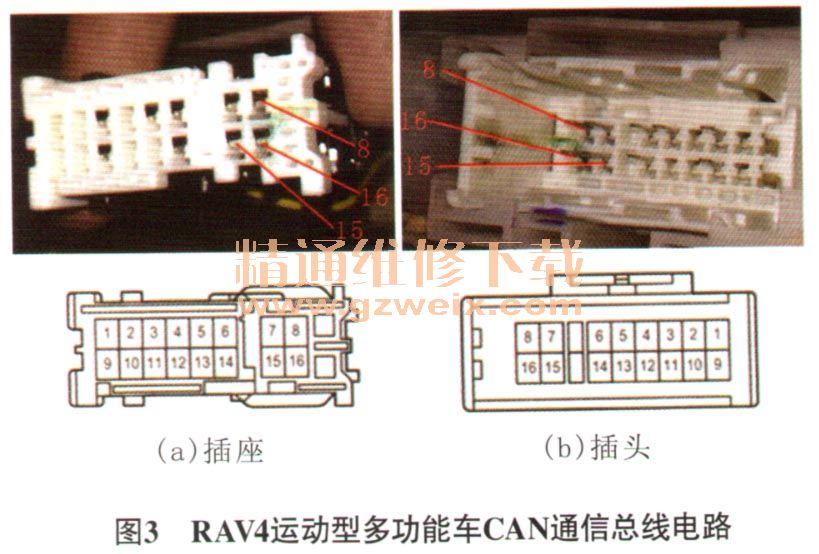
根据R AV4运动型多功能车CAN通信总线电路(图3),首先断开安装在驾驶室内左前围侧仪表板下方的导线连接器E75,使CAN通信总线主链路上的ECU和分支链路断开,分别测量导线连接器E75连接器插座(带线束)一侧的端子1与端子12、端子2与端子13、端子3与端子14、端子4与端子15、端子5与端子16、端子6与端子17、端子7与端子18、端子8与端子19之间的电阻,结果发现端子5与端子16之间的电阻为0Ω,而导线连接器E75的端子5和端子16又通过导线连接器EK1的端子16和端子15与横摆率传感器的端子3和端子2相连接,于是断开安装在驾驶室内左前围侧A柱下方的导线连接器EK1,发现导线连接器EK1的端子16、端子15和端子8有进水腐蚀的痕迹(图4),至此故障点找到,是导线连接器EK1端子16和端子15进水受潮,造成CAN通信总线CANH与CANL线路之间短路。那么导线连接器EKI进水原因是什么呢?于是对该车进行模拟淋雨试验,发现车辆天窗的落水管堵塞,水从天窗沿A柱流入到导线连接器EK1内,从而造成导线连接器EK1端子受潮腐蚀。

故障排除:疏通天窗落水管,并对导线连接器EK1的端子16、端子15和端子8进行清洁处理,重新连接好导线连接器EK1和E75,再次测量 DLC3诊断连接器的端子b(CANH)和端子14(CANL )之间电阻,为59Ω,正常;连接GTS,将点火开关置于ON位,清除故障代码后起动发动机试车,转向助力恢复正常,仪表板上故障警告灯熄灭。
故障总结当代汽车大多已采用电动助力转向系统代替液压助力转向系统。电动转向ECU根据车速传感器、转向角传感器、电动转向电动机上的扭矩传感器和车辆横摆率传感器的信号来计算确定电动转向助力的方向和大小,而这些采集到的传感器信号都以报文形式通过CAN通信总线来进行实时的数据传输,提供给相关系统共享。CAN通信总线采用线型拓扑结构,其各个节点共用一个总线作为数据通路,进行双向数据传输,提高了信道利用率。线形拓扑结构存在的缺点就是,由于信道共享,连接的节点不宜过多,且总线自身故障,如链路上主、分支总线或节点内数据信息收发器电路发生短路(总线对电源短路、总线对搭铁短路、总线之间短路),均可导致整个系统崩溃。本案例故障就属于这种情况。但是,CAN通信总线短路故障有以下特点可供维修技术人员判断故障时参考。
(1)总线上所涉及到的系统的故障灯均会点亮报警。
(2)故障检测仪无法与总线上的ECU进行通信。
(3)为确保车辆安全行驶,有些车辆在CAN通信总线发生短路时甚至会造成发动机无法起动,或CAN通信总线转到失效保护模式,使车辆处于“跛行”状态。
(4)对于CAN通信总线短路故障的检查,可以用断开主、分支总线导线连接器和ECU,分别测量CANH,CANL总线对+B或搭铁之间的电阻及CANH,CANL总线之间的电阻的方法找到故障点。





