・上一文章:大众帕萨特轿车ABS报警灯点亮
・下一文章:奇瑞QQ3发动机缺缸、故障灯常亮
大众CC是一款标准的轿跑车,有许多高科技配置。主动巡航系统是其选装配置之一,该系统又被称为自适应巡航系统(Adaptive CruiseControl),简称ACC,是一种新型的驾驶辅助系统。主动巡航系统与传统的定速巡航系统相比,在功能上有很大的扩展。它的基本功能是在前方没有其他车辆时保持驾驶员所设定的巡航速度,在前方有其他车辆时自动保持与前方车辆的设定距离。
一、主动巡航系统基本原理及组成
主动巡航系统的核心部件是自动车距调节控制单元,位于车辆前部大众徽标后,位置如图1所示。

自动车距调节控制单元与车距传感器及传感器加热器制成一体。车距传感器为毫米波雷达传感器,可发射载波为76.6GHz的调频振荡波。
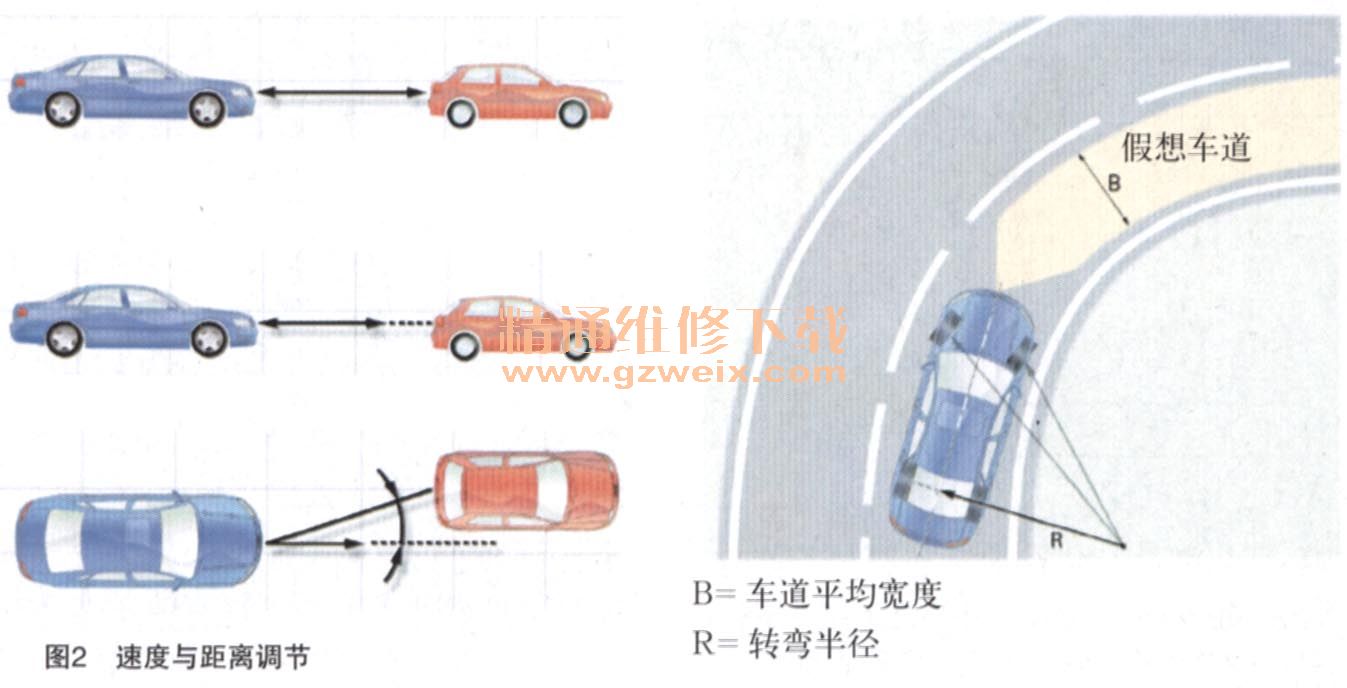
自动车距调节控制单元通过分析对比发射信号与接收部分反射信号,可以得到前车与本车距离、前车车速、前车与本车相对运动角度等3个基本信息。自动车距调节控制单元同时需要根据车速、转向盘转角,以及横摆角速度等信号,确定出车辆的“假想车道”,由此选定目标车辆来进行速度与距离调节,如图2所示。
主动巡航系统的组成:
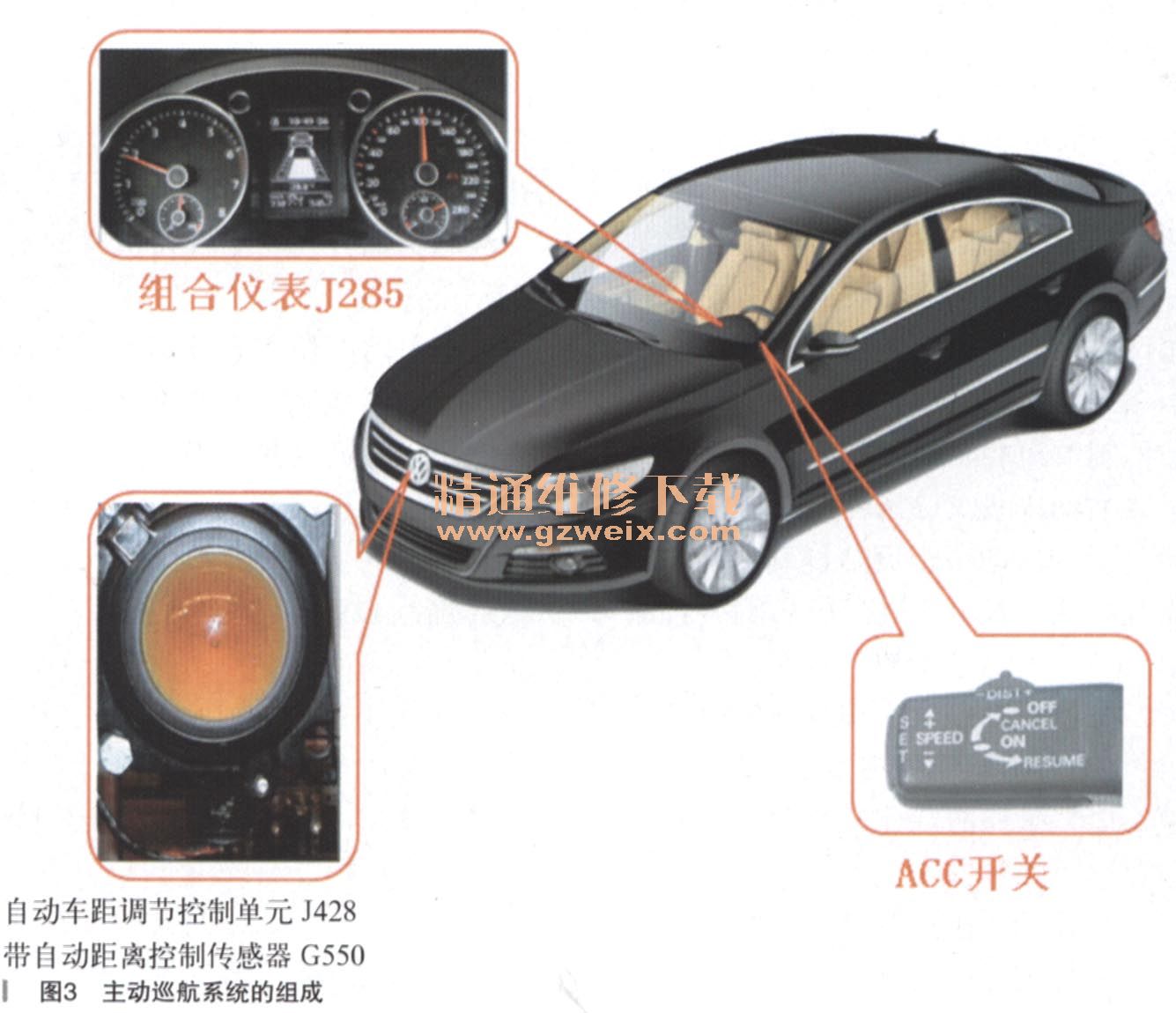
专属于主动巡航系统的硬件组成较简单,主要包括:巡航控制开关、自动车距控制单元及传感器总成,组合仪表中车距显示及报警系统,如图3所示。
主动巡航系统要实现自动控制车距及车速控制,需要车上很多部件的协同工作。如驱动CAN总线系统中的发动机控制单元、ESP控制单元、转向盘转角传感器等。舒适系统CAN总线中的转向柱控制单元、电气系统控制单元。当然,网关控制单元更是不可或缺,它是各控制单元信息交换的枢纽。
大众CC车主动巡航系统的电路图,如图4所示。
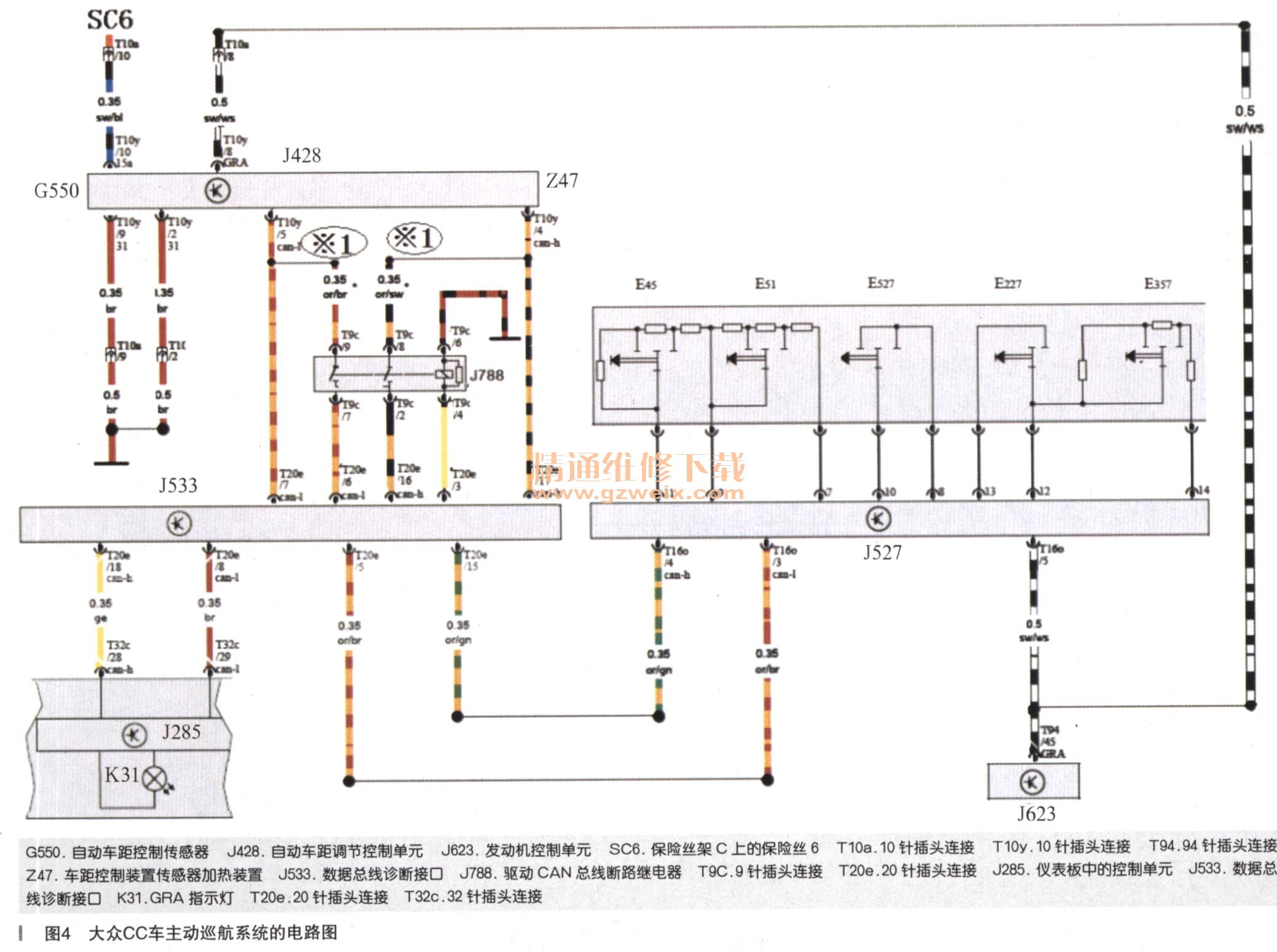
大众CC车的主动巡航系统在2011年3月开始进行了更新(电路图中※1处)。在此之前,自动车距调节控制单元J248通过驱动总线断路继电器J788与驱动CAN总线相连。在此之后,自动车距调节控制单元J248通过扩展CAN总线直接与网关控制单元J533相连进行信息交换。





