・上一文章:大众帕萨特轿车ABS报警灯点亮
・下一文章:奇瑞QQ3发动机缺缸、故障灯常亮
二、主动巡航系统故障处理
主动巡航系统硬件组成相对简单,电气线路故障比较少见,常见故障有以下两种。
1.自动车距控制单元损坏
故隆现象:打开巡航开关,组合仪表提示巡航系统故障,主动巡航无法开启。
故障诊断:自诊断检查故障码如图5所示。
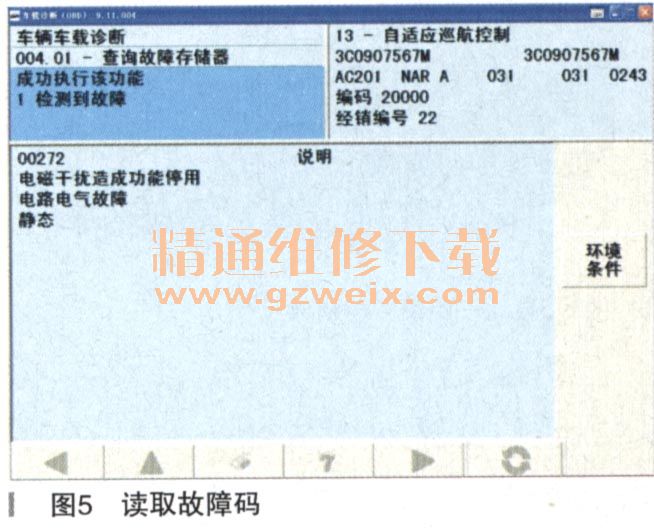
根据电路图检查主动巡航系统中自动车距调节控制单元的电源及接地线路,如正常进一步检查巡航主开关的开启信号。在巡航主开关开启的情况下,J428的T10y/8插脚处应该能检测到约为12V左右的高电位。
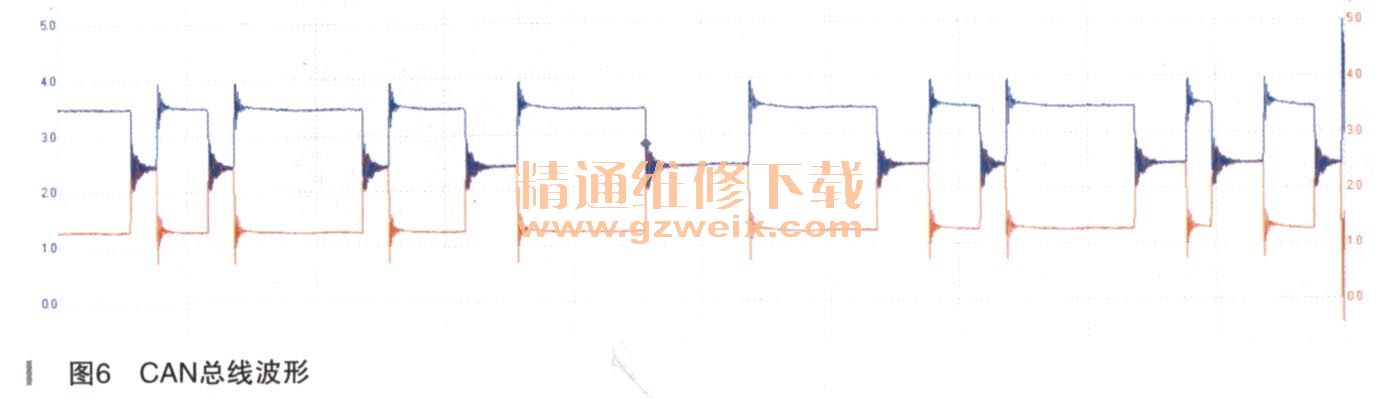
在排除了电源及巡航主开关信号后,可用示波器检查J428控制单元T10y/5及T10y/4两脚的驱动CAN总绷或扩展CAN总线)的波形信号,正常信号波形如图6所示。
通过测量可排除线路故障。维修经验表明,出现上述故障码,多为自动车距调节控制单元及ACC传感器总成损坏。
故障排除:更换部件总成,然后进行ACC传感器校准。
2.ACC传感器位置偏移
主动巡航系统在下述情况下必须对ACC传感器探头进行机械调整:
①车辆进行了四轮定位调整;
②ACC传感器拆装或更换;
(3) ACC传感器固定支架拆装或更换;
④车辆前部拆装或损坏。
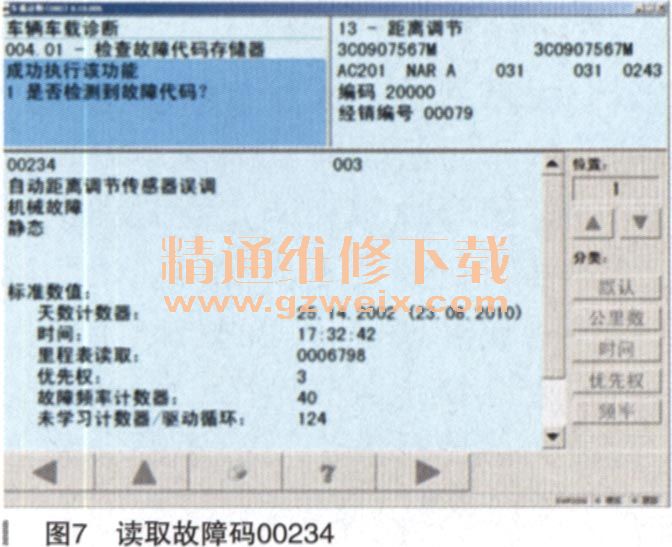
如果车辆进行过上述操作而未进行ACC传感器校准,在使用主动巡航系统时,组合仪表多功能显示区出现报警提示,且主动巡航系统中出现“00234,自动车距传感器误调,机械故障”,如图7所示。
当出现上述故障后,可查看13主动巡航系统中的第6组数据测量值(如图8所示),其中显示区1为实际偏差值,正常应该显示0。如果显示异常则表示需要对ACC传感器进行校准。
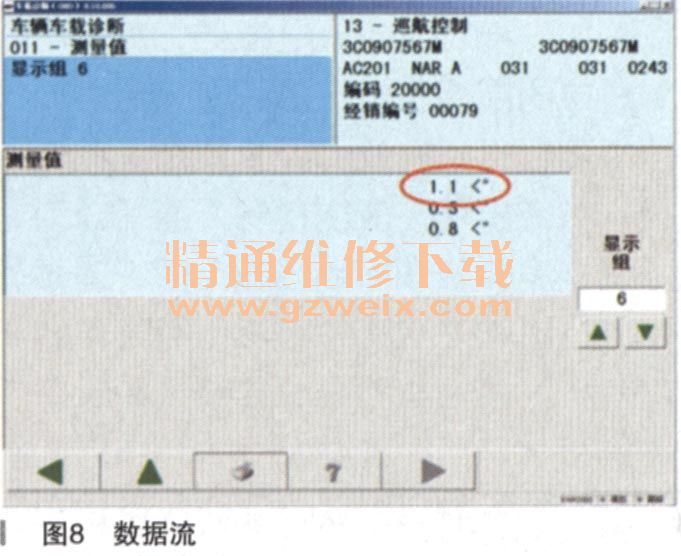
如果ACC传感器需要校准,应该到具备相应资质的4S店,利用专用工具VAS6430配合四轮定位仪进行校准,校准后可使实际偏差值归零。
总结:更换主动巡航系统的自动车距调节控制单元及传感器总成时,应注意车辆生产日期。该控制单元分为带驱动CAN总线及带扩展CAN总线两种。混装后虽巡航系统能够工作,但在车道保持系统中会有主动巡航控制单元信号错误的故障码,造成车道保持系统无法工作等相关故障,所以在订购备件时应该注意。





