・上一文章:华人三年免费卫星接收机无信号故障维修
・下一文章:任务驱动教学法在汽车故障诊断与检侧课程中的应用
CAN-BUS,即CAN总线技术,全称为‘“控制器局域网总线技术(Controller Area Network -BUS)”。CAN是现代轿车电脑通信的主流方式,而对驱动CAN的诊断和检修是维修技师必须掌握的一门手艺,然而,在我国汽车维修高端人才紧缺的情况下,车辆的驱动CAN一旦出现问题,会给车辆故障排除工作带来很大困难。本文通过阐述驱动CAN的机理,提出其常见线路故障和检修方法。
一、驱动CAN的检修机理
驱动CAN也称之为动力总线,它所连接并通信的车辆部件有:发动机控制单元、变速器控制单元、转向柱开关模块(方向盘转角传感器)、ABS制动系统控制单元、大灯调节控制单元(带有氛气大灯)、安全气囊控制单元和网关。它一旦出现故障必将对车辆性能造成严重的影响,它的检修机理是这样的----
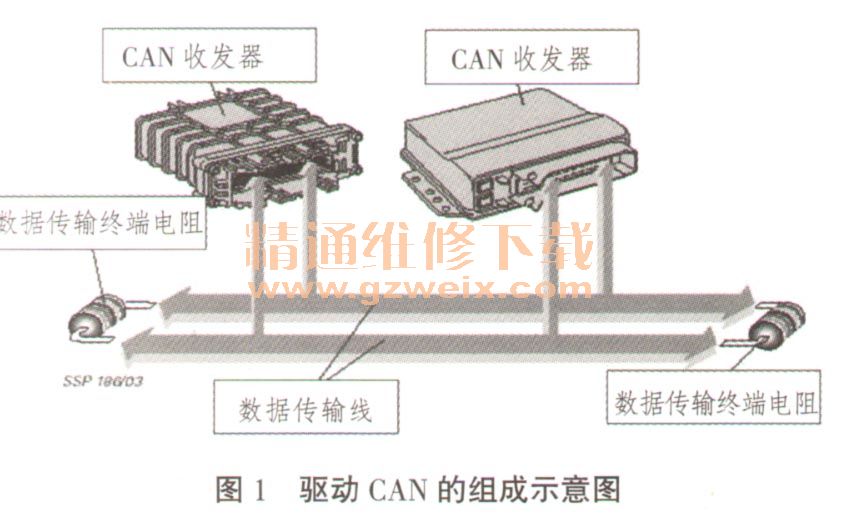
它是由2根双向高低双绞线、CAN收发器和数据传输终端电阻组成,如图1所示。
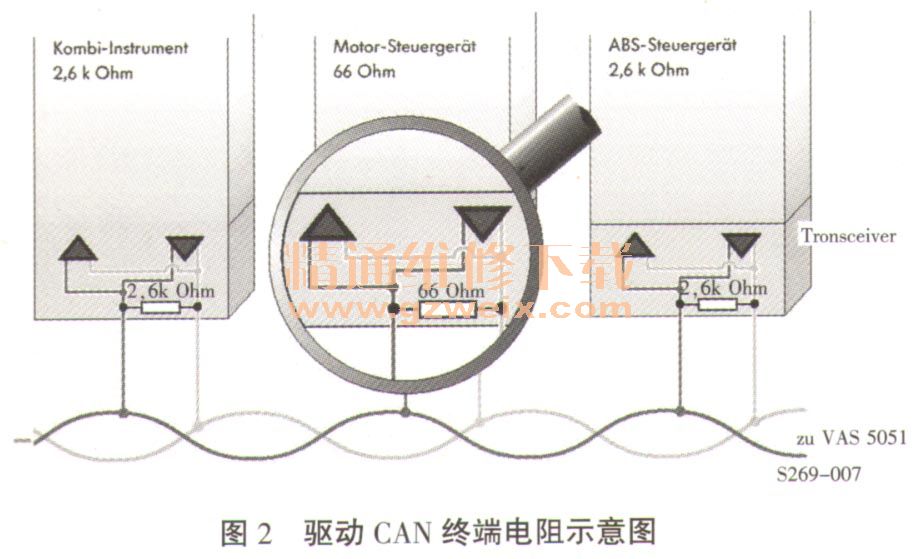
在驱动CAN相连的电脑中基本都有1个终端电阻,如图2所示。这样在驱动CAN线没有工作时,可以通过测量终端电阻来简易判断驱动CAN的好坏。
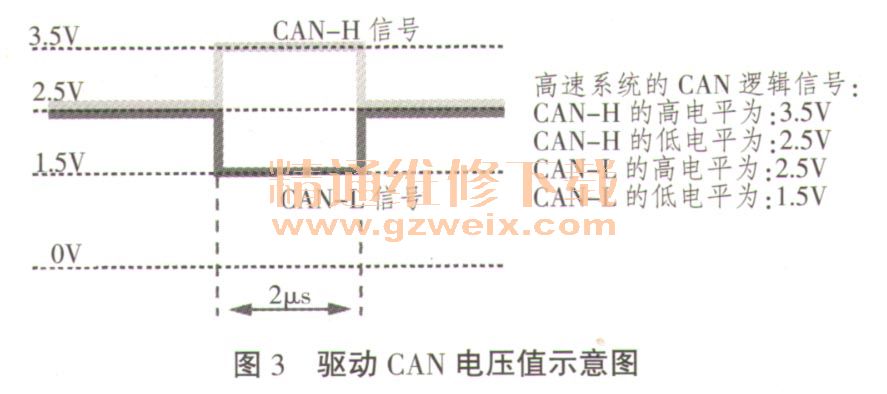
在驱动CAN线没有工作时,其CAN-H和CAN-L电压为2.5V,当开始传输数据时,CAN-H变为3.5V 、CAN-L变为1.5V,因为车辆用电设备比较多,该CAN信号容易被干扰,CAN-H和CAN-L电压会在其值左右跳动,但因其采用了双绞线形式可以减少这种干扰的影响,因为CAN-H和CAN-L绞织在一起,各节点同步被干扰的程度也会一样,这样就可保证CAN-H和CAN-L的电压差始终为2V,这样在电脑设计显性电位1和隐性电位0时就稳定得多了。
因此其简易的电压检测方法就是测量CAN -H和CAN -L的电压值,来判断CAN的好坏,电压值示意图如图3所示。


")


