・上一文章:松下TH-65PF10CK等离子彩电电路板资料
・下一文章:剖析丰田埃尔法车身系统新技术(五)
如果发动机扭矩减小后,并没有减少驱动轮打滑,则电子制动控制模块将主动对打滑的驱动轮进行制动。牵引力控制制动期间,控制各个驱动轮电路的液压压力以防止驱动轮打滑。电子制动控制模块指令泵电机和相应的电磁阀接通和关闭,以便向打滑车轮施加制动压力。
牵引力控制可通过按下牵引力控制开关手动停用。
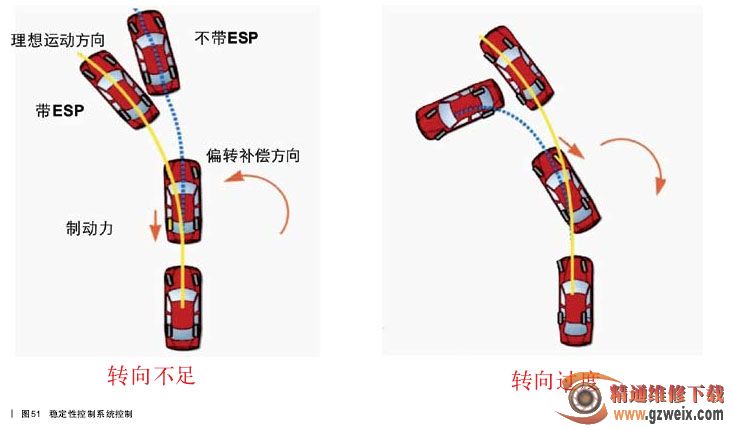
3. 稳定性控制系统 (ESP):猛烈操作车辆时,稳定性控制提供附加稳定性。横向偏摆率指绕车辆纵向轴线摆动的角速度。当电子制动控制模块确定期望的横向偏摆率与横向偏摆率传感器测量的实际横向偏摆率不符时,会启动稳定性控制系统。
期望的横向偏摆率由电子制动控制模块使用以下输入来计算:转向盘位置、车速、横向加速度。
理想的横向偏摆率和实际的横向偏摆率之间的差值为横向偏摆率误差,是转向过度或转向不足测量结果。当检测到横向偏摆率误差,电子制动制模块会尝试对一个或多个车轮施加制动压力,以此对车辆横向偏摆运动进行校正。施加制动压力大小根据校正需求而变化。如果有必要在维持车辆稳定时降低车速,则发动机扭矩也可能减小(如图51所示)。
稳定性控制通常在行驶过猛时于转弯处启动。在稳定性控制启动过程制动,制动踏板会产生脉动。
稳定性控制可通过按下牵引力控制开关 5s 手动停用。
ESP 稳定控制程序的优点:
◆ 提高驾驶安全性
◆
优化操控性及驾驶舒适性
◆ 通过对车辆横向和纵向的动态控制提高 ABS/TCS 的性能
◆ 避免更多的事故发生
")
")
")
")

